










Arduino запуск шагового двигателя
Содержание
- Возникли проблемы с тем, чтобы мой шаговый двигатель реагировал на мой датчик кнопки в эскизе Arduino
- Arduino запуск шагового двигателя
- Урок 2. Как подключить A4988 (DRV8825) к Arduino? Скетч, библиотека.
- Управление шаговым двигателем NEMA 17
Возникли проблемы с тем, чтобы мой шаговый двигатель реагировал на мой датчик кнопки в эскизе Arduino
Я использую библиотеку AccelStepper для управления моим шаговым двигателем, и мне трудно понять, как заставить мой двигатель остановиться, когда моя кнопка нажата.
Я могу заставить мотор остановиться, как только он завершит все свое движение по команде moveTo , но я не могу заставить его остановиться до того, как он закончит. Я пробовал использовать if statement, вложенный в while loop, который я использую, чтобы заставить двигатель работать, но без костей.
2 ответа
- Как управлять шаговым двигателем с помощью инфракрасного ИК-приемника?
Привет, я новичок в Arduino Uno Мой вопрос заключается в том, как повернуть шаговый двигатель 90 dgree по часовой стрелке только тогда, когда инфракрасная цензура что-то цензурирует, и повернуть против часовой стрелки, когда вторая инфракрасная цензура что-то нажимается снова? Шаговый двигатель.
Я работаю с шаговым двигателем, подключенным к контактам 9, 10, 11 и 12 на Arduino Uno. Для того чтобы вращать шаговый двигатель, я написал вспомогательный метод. Этот конкретный шаговый двигатель вращается на 30 градусов за один шаг. Метод таков: void rotateStepperBy(float deg) Читать еще: Что такое дефлектор двигателя
У меня есть проблема, так как я новичок в языке opencv python, любая идея, когда камера захватит шаговый двигатель, будет вращаться на 90 градусов.
Arduino запуск шагового двигателя
Пошаговая инструкция о том как своими руками собрать регулятор скорости вращения для униполярного шагового двигателя.
А именно о том как собрать электронную часть, как загрузить прошивку в управляющий микроконтроллер, как запустить все в работу и что для всего этого понадобится.
Регулятор скорости вращения для биполярного шагового двигателя на базе Arduino Nano
Самодельный димер на базе платы Arduino Nano и драйвера DRV8825
Два варианта управления биполярным шаговым двигателем, с кнопками для пуска и смены направления вращения.
Привод для жалюзи на базе Arduino UNO и шаговых двигателях 28BYJ-48 5V
Как собрать привод для жалюзи, на базе Arduino UNO и двух шаговых двигателях 28BYJ-48 5V.
К данной статье прилагаются два готовых скетча.
Управление двумя шаговыми двигателями с помощью джойстика на базе Arduino UNO.
Статья о том, из чего и как своими руками собрать привод на базе Arduino UNO, джойстика и двух униполярных шаговых двигателях 28BYJ-48 5V
Имеется схема и скетч, работающий без библиотек.
Автоматическая фокусировка на Arduino и Digispark с датчиком расстояния VL53L0X и драйвером DRW8825.
Статья, содержащая материалы для изучения и сборки двух вариантов привода, для автоматической фокусировки микроскопа, на Arduino UNO и Digispark
Как объединить две платы Arduino и Digispark, для совместной работы над общей задачей.
Как подключить биполярный шаговый двигатель к Arduino Uno и к Digispark.
Управление двумя униполярными шаговыми моторами по Bluetooth.
Статья о том, как своими руками собрать беспроводное управление, для двух униполярных шаговых моторов 28BYJ-48 5V.
В качестве пульта подойдет любой ANDROID телефон с наличием Bluetooth.
Лучший эмулятор Arduino UnoArduSim V2.6. Первая серия.
Набор из 9 простых скетчей, которые использовались в этой серии.
В этой серии рассмотрены принципы работы таких модулей как: светодиод, кнопка, потенциометр, Serial порт, программный Serial порт, 4 фазный шаговый двигатель, 2 фазный шаговый двигатель и DC Motor.
Регулятор скорости вращения для униполярного шагового двигателя на базе Didgispark
Простой и не дорогой, регулятор скорости вращения, для униполярного шагового двигателя.
В статье есть перечень материалов, скетч, схема для сборки, и видео инструкция.
Arduino управление шаговыми двигателями по Bluetooth при помощи Android смартфона
Статья о том как написать код для электрического привода, для слайдера под видеокамеру, с управлением по Bluetooth, на базе Arduino Nano, драйверов DRV8825 и Bluetooth модуля HC-05.
Управление биполярным шаговым двигателем при помощи инкрементального энкодера
Статья о том как подключить инкрементальный энкодер EC11 к Arduino, как управлять биполярным шаговым двигателем при помощи энкодера, как проверить инкрементный энкодер, как подключить драйвер шагового двигателя drw8825 к Arduino.
Творческая мастерская Мастер Колотушкин 2022
Проекты на базе Arduino для начинающих, электронные самоделки своими руками.
Урок 2. Как подключить A4988 (DRV8825) к Arduino? Скетч, библиотека.
Сегодня в уроке подключим драйвер шагового двигателя A4988 (DRV8825) к Arduino. Рассмотрим самый простой скетч (код,) который позволит вращать шаговым двигателем по часовой и против часовой стрелке.

Что такое шаговый двигатель? Описание драйвера шагового двигателя A4988 и описание драйвера шагового двигателя DRV8825, а также много другой полезной информации по ЧПУ станкам и 3D принтерам, вы сможете найти на моем втором сайте ЧПУ технологии (CNC-tex.ru).
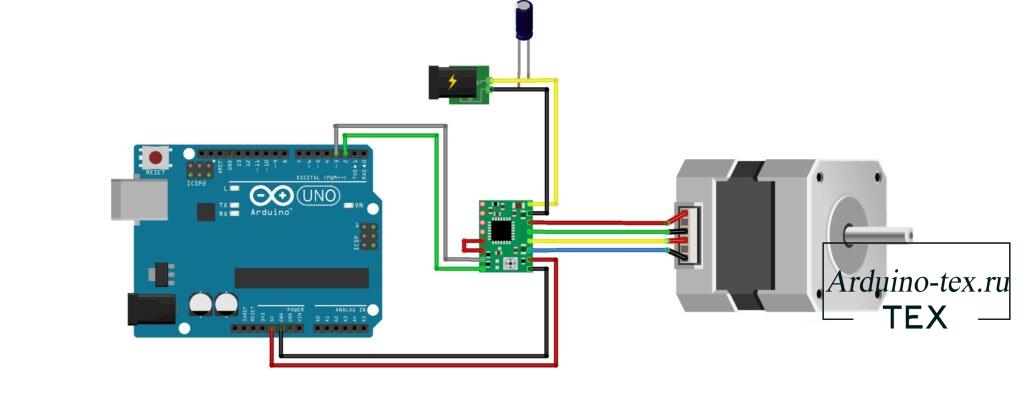
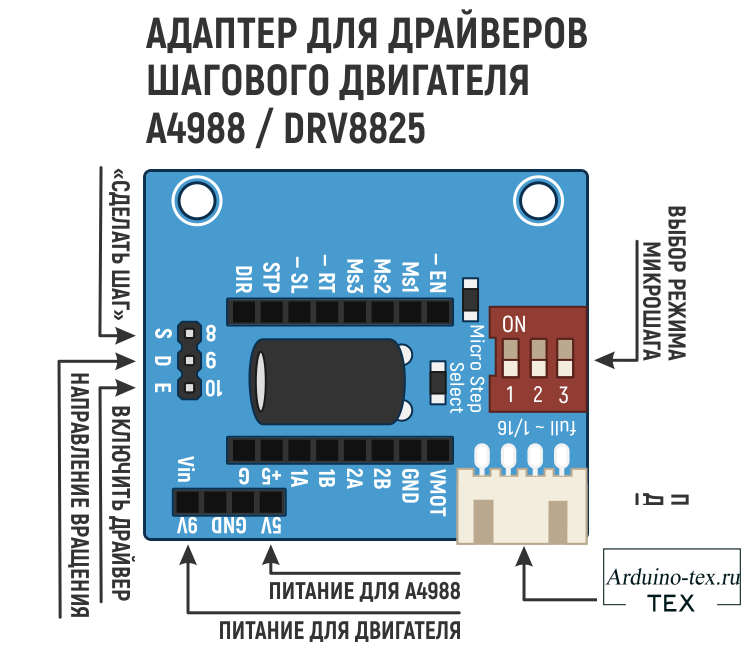
Схема подключения драйвера шагового двигателя A4988 (DRV8825).
Для тех, кому лень сходить на мой второй сайт по ЧПУ станкам, выкладываю схемы подключения драйверов A4988 (DRV8825) к Arduino.
Драйвер шагового двигателя A4988 можно подключить к микроконтроллеру Arduino напрямую вот по такой схеме.
Драйвер шагового двигателя DRV8825 можно подключить к микроконтроллеру Arduino напрямую вот по такой схеме.
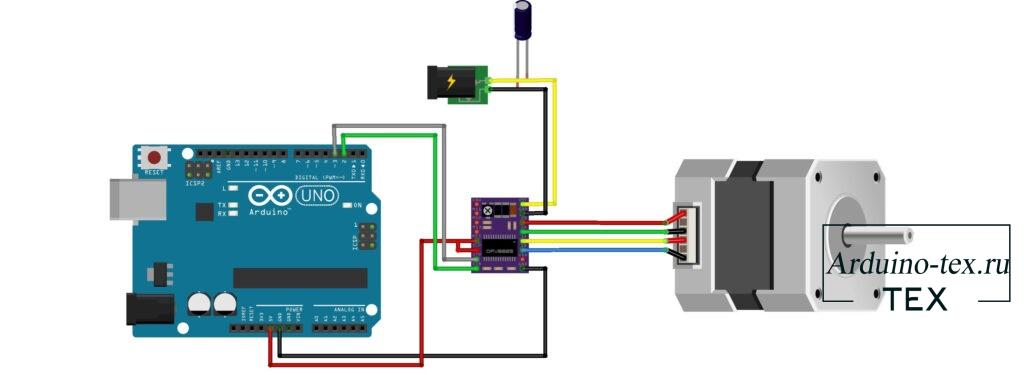
Внимание! Для корректной работы шагового двигателя для драйвера необходимо настроить ток. Как рассчитать ток для драйвера A4988 читайте тут, для драйвера DRV8825 читайте тут. Также при необходимости установите радиатор охлаждения драйвера.
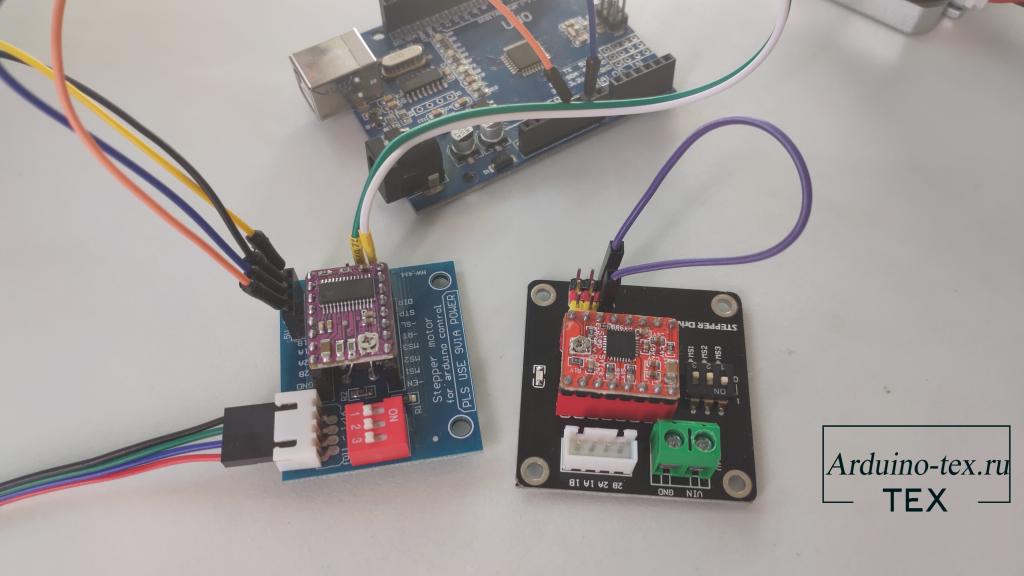
Подключение драйвера шагового двигателя A4988 и DRV8825 с помощью модуля.
Для облегчения подключения драйверов к Arduino существуют специальные модули, которые помогут без лишних усилий и пайки подключить драйвер A4988 или DRV8825. Подробнее о модулях для подключения драйвера A4988 и DRV8825 читайте тут. Подробно останавливаться на типах модулей и особенностях подключения не буду.
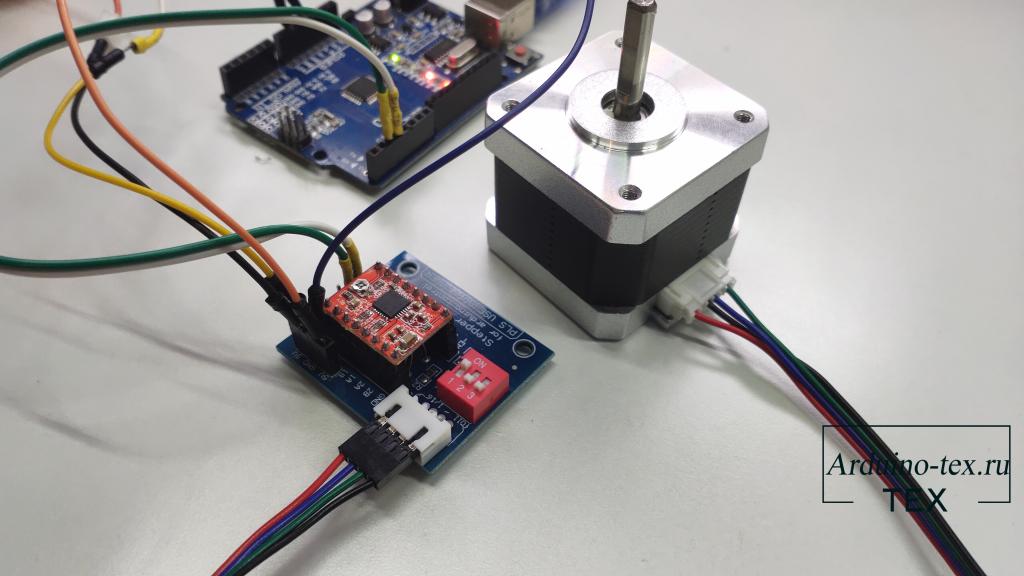
Внимание! При установке драйвера на модуль будьте осторожны.Драйвер может сгореть, если не правильно установить его на модуль.
С подключением определились, пора перейти к коду, который позволит управлять шаговым двигателем.
Код для Arduino и A4988 (DRV8825),который позволяет вращать шаговым двигателем без библиотеки.
Следующий код даст представление о том, как управлять скоростью и направлением вращения биполярного шагового двигателя с помощью драйвера шагового двигателя A4988. Данный скетч может служить основой для более интересных экспериментов и проектов на Arduino.
Пояснение к коду:
Скетч начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR драйвера A4988. Здесь также определяем stepsPerRevolution – количество шагов на оборот. Установите данное значение в соответствии со спецификациями шагового двигателя 200 (поскольку NEMA 17 делает 200 шагов за оборот).
В разделе настройки кода setup(), все контакты управления двигателем объявлены как цифровой выход ( OUTPUT ).
В основном цикле loop() будем медленно вращать двигатель по часовой стрелке, а затем быстро вращать его против часовой стрелки, с интервалом в секунду.
Управление направлением вращения.
Для управления направлением вращения двигателя мы устанавливаем контакт DIR на высокий уровень HIGH, или низкий LOW. При значении HIGH — вращает двигатель по часовой стрелке, а LOW — против часовой стрелки.
Управление скоростью шагового двигателя.
Скорость двигателя определяется частотой импульсов, которые мы посылаем на вывод STEP . Чем чаше импульсы, тем быстрее работает двигатель. Импульсы — это не что иное, как подтягивание выхода к высокому уровню HIGH , некоторое ожидание, затем подтягивание его к низкому уровню LOW и снова ожидание. Изменяя задержку между двумя импульсами, вы изменяете частоту импульсов и следовательно, скорость вращения двигателя.
Код для Arduino управления драйвером A4988 (DRV8825)с использованием библиотеки AccelStepper.
Управление шаговым двигателем без библиотеки идеально подходит для простых проектов на Arduino с одним двигателем. Но если вы хотите управлять несколькими шаговыми двигателями, вам понадобится библиотека. Итак, для нашего следующего примера будем использовать библиотеку шаговых двигателей под названием AccelStepper library.
AccelStepper library поддерживает.
Ускорение и замедление. Несколько одновременных шаговых двигателей с независимыми одновременными шагами на каждом шаговом двигателе. Эта библиотека не включена в IDE Arduino, поэтому вам необходимо сначала установить ее.
Установка библиотеки AccelStepper.
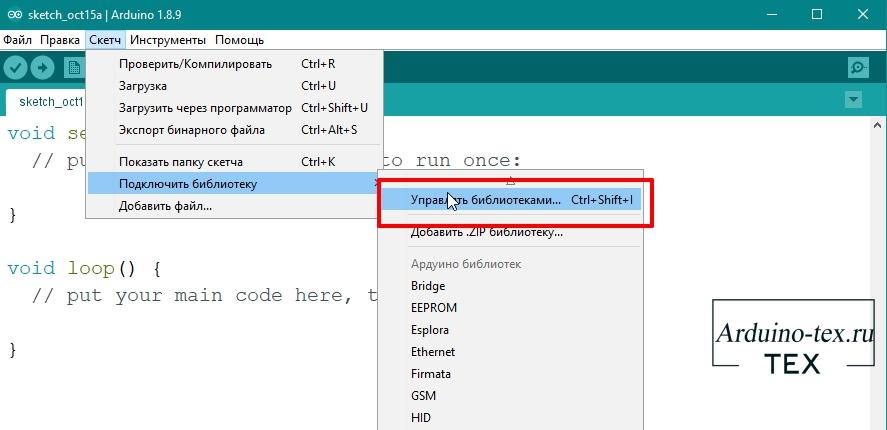
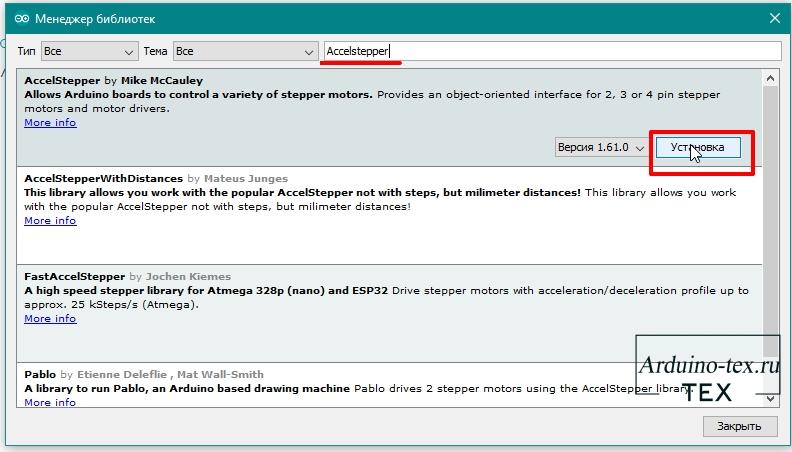
Чтобы установить библиотеку, перейдите в «Скетч» -> «Подключить библиотеку» -> «Управление» библиотеками. Подождите, пока диспетчер библиотек загрузит индекс библиотек и обновит список установленных библиотек.
Отфильтруйте свой поиск, набрав «Accelstepper». Щелкните первую запись и выберите «Установка».
Код Arduino с использованием библиотеки AccelStepper.
Вот простой пример, который ускоряет шаговый двигатель в одном направлении, а затем замедляется до полной остановки. Как только двигатель делает один оборот, меняет направление вращения. Данный цикл повторяется снова и снова.
Пояснение к коду:
Подключаем библиотеку AccelStepper.
Дальше определяем выводы Arduino, к которым подключаются выводы STEP и DIR A4988. Мы также устанавливаем motorInterfaceType на 1. (1 означает внешний шаговый драйвер с выводами Step и Direction).
Затем мы создаем экземпляр библиотеки под названием myStepper .
В функции настройки мы сначала устанавливаем максимальную скорость двигателя равной тысяче. Затем мы устанавливаем коэффициент ускорения для двигателя, чтобы добавить ускорение и замедление к движениям шагового двигателя. Дальше устанавливаем обычную скорость 200 и количество шагов, которое мы собираемся переместить, например, 200 (поскольку NEMA 17 делает 200 шагов за оборот).
В основном цикле loop() используем оператор if , чтобы проверить, как далеко двигателю нужно проехать (путем чтения свойства distanceToGo ), пока он не достигнет целевой позиции (установленной moveTo ). Как только distanceToGo достигнет нуля, поменяем направление вращения двигателя в противоположном направлении, изменив значение moveTo на отрицательное по отношению к его текущему значению. Теперь вы заметите, что в конце цикла мы вызвали функцию run () . Это самая важная функция, потому что шаговый двигатель не будет работать, пока эта функция не будет выполнена.
Это небольшой пример использования библиотеки AccelStepper. В следующем уроке подробнее рассмотрим данную библиотеку и сделаем пару классных примеров использования шаговых двигателей в Arduino проектах.
Понравился Урок 2. Как подключить A4988 (DRV8825) к Arduino? Скетч, библиотека? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Управление шаговым двигателем NEMA 17
Интересно, что по запросу arduino шаговый двигатель ищется масса статей, большей частью однотипных. Не спорю, данные статьи помогли и мне, но большей частью они, к сожалению, написаны в стиле рисование совы (кто не в курсе: рисуем две окружности, далее рисуем оставшуюся часть совы).
В настоящей статье речь будет идти о работе с шаговым двигателем NEMA 17 с помощью драйвера A4988. Подключение такое же, как и во всех статьях для начинающих.
Какие проблемы я встретил в процессе подключения шагового двигателя?
Их две, практически как базовые статьи о подключении двигателя. Первая — вибрация при вращении шагового двигателя, которая решается с помощью библиотеки accelStepper. Второй часто встречающийся пример лишён указанного недостатка, но понимания не добавляет. Ну и вторая — как раскрутить шаговый двигатель до сверхсветовых скоростей собственными руками?
В начале о первой проблеме.
О вибрации и accelStepper
Вибрации нет. Как Вы уже должно быть знаете, главное отличие шагового двигателя — это пошаговое вращение. Так вот, вышеописанная вибрация есть ни что иное, как обычное нормальное шаговое движение двигателя.
Если теперь вспомнить школьный курс физики, а именно ту его часть, где говорится о разного рода ускорениях, сохранении энергии, моменте инерции и резонансе, в конце концов — становится понятна причина вибрации. Ротор имеет некоторую массу, которую мы заставляем каждый шаг менять положение. Соответственно при изменении положения ротор во-первых получает ускорение, накапливая энергию, а затем пытается сохранить переданный импульс, а мы его тормозим в положении шага. Если неудачно подобрать время между шагами, вся наша система будет сильно вибрировать и даже может войти в какой-либо резонанс.
Отличие между вибрирующим и нормальным кодом:
| digitalWrite(stepPin,HIGH); delay(10); digitalWrite(stepPin,LOW); delay(10); |
digitalWrite(stepPin,HIGH); delayMicroseconds(500); digitalWrite(stepPin,LOW); delayMicroseconds(500); |
Всё различие в длине управляющих импульсов. Вибрирующий код шагает каждые 10 миллисекунд (1с = 1000мс), нормальный — каждые 500 микросекунд (1мс = 1000мкс). Т.е. невибрирующий код просто шагает чаще и ротор сохраняет свою энергию до следующего шага, а не теряет на остановке.
Собственно вот и всё исправление вибрации без применения сторонних библиотек.
Количество микросекунд между импульсами может варьировать от двигателя к двигателя. На имеющихся у меня двигателях NEMA 17 значение меньше 450мкс приводит к нестабильности и пропуску шагов. Но, возможно, просто напросто не хватает мощности блока питания (хотя вряд ли, блока питания с избытком).
Раскручиваем наш вертолёт
В интернете я нашёл как статьи так и видео, свидетельствующие о том, что шаговый двигатель может вращаться достаточно бодро. Тем не менее я столкнулся с ограничением в 500мкс, чаще которого подавать импульсы не получалось. Точнее получалось, но двигатель лишь жужжал и не вращался.
На одном из сайтов я натолкнулся в комментариях на обсуждение ускорения/замедления шагового двигателя (к сожалению, ссылка не сохранилась, т.к. вспомнил об этой информаци сильно позже). Реплика натолкнула на мысли об ускоренном раскручивании шагового двигателя.
Код получился элементарный:
const unsigned int initialDelay = 500;
Данный код с каждым шагом уменьшает время между двумя соседними импульсами. После этого двигатель закрутился заметно быстрее. При этом уменьшение порога (250 мкс) во-первых, приводит к уменьшению момента, а во-вторых при некотором минимальном значении двигатель вначале ускоряется, затем останавливается, момента становится не хватать для вращения.
Но появилась другая проблема, это видно из кода, после 2000 шагов двигатель останавливается. Только останавливается он не в той точке, в которой необходимо. Ротор проскакивает несколько шагов. Другими словами, чтобы шаговый двигатель можно было раскрутить и потом остановить в нужном положении, нужно раскручивать и замедлять его с ускорением.
Итог работы
В результате появилась примитивная реализация функции для раскручивания шагового двигателя на максимум. Начальное и минимальное время между импульсами можно подобрать самостоятельно.
/* Stepper Motor Control with acceleration Example Code
*
* by Landgraph, www.Landgraph.ru
*/
const int stepPin = 3;
const int dirPin = 4;
// Initial delay time in microseconds
const unsigned int sleepTimeInit = 500;
// Minimal delay time in microseconds
const unsigned int minSleepTime = 150;
void RotateBySteps(unsigned int steps, bool CCW=false)
(accelerationSteps + decelerationSteps))
else
Источник: