










Энкодер с кнопкой ардуино
Часто в устройствах на микроконтроллерах нужно организовать управление пунктами меню или реализовать какие-то регулировки. Есть множество способов: использовать кнопки, переменные резисторы или энкодеры. Инкрементальный энкодер позволяет управлять чем-либо посредством бесконечного вращения ручки. В этой статье мы рассмотрим, как заставить работать инкрементальный энкодер и Arduino.
Особенности инкрементального энкодера
Инкрементальный энкодер, как и энкодеры любых других типов представляют собой устройство с вращающейся рукоятью. Отдаленно он напоминает потенциометр. Основным отличием от потенциометра является то, что рукоять энкодера вращается на 360 градусов. У него нет крайних положений.
Энкодеры бывают разных типов. Инкрементальный отличается тем, что с его помощью нельзя узнать положение рукояти, а только сам факт вращения в какую-то сторону – влево или вправо. По количеству импульсов сигнала вы уже можете рассчитать на какой угол он повернулся.
Таким образом вы можете передать микроконтроллеру команду, управлять меню, уровнем громкости, например, и так далее. В быту вы могли их видеть в автомагнитолах и другой технике. Его используют в качестве многофункционального органа регулировки уровней, эквалайзера и навигации по меню.

Принцип работы
Внутри инкрементального энкодера есть диск с метками и ползунки, которые с ними соприкасаются. Его строение подобно потенциометру.

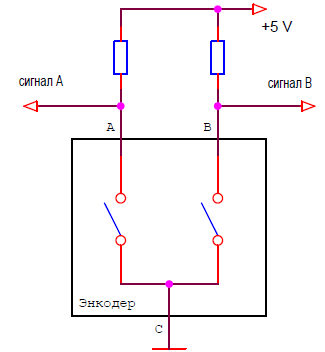
На рисунке сверху вы видите диск с метками, они нужны для прерывания электрического соединения со подвижным контактом, в результате вы получаете данные о направлении вращения. Конструкция изделия не столь важна, давайте разберемся в принципе работы.
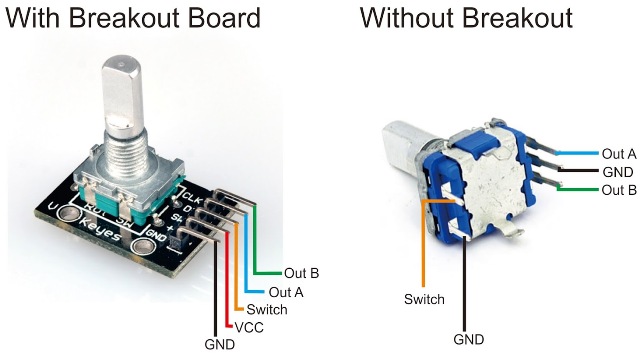
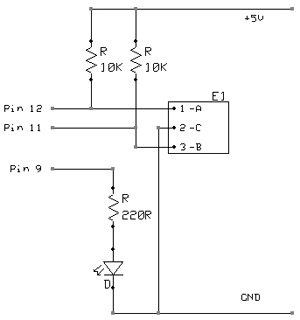
У энкодера есть три информационных вывода один общий, остальные два обычно называют A и B, на рисунке выше вы видите цоколевку энкодера с кнопкой – вы можете получать сигнал при нажатии на его вал.
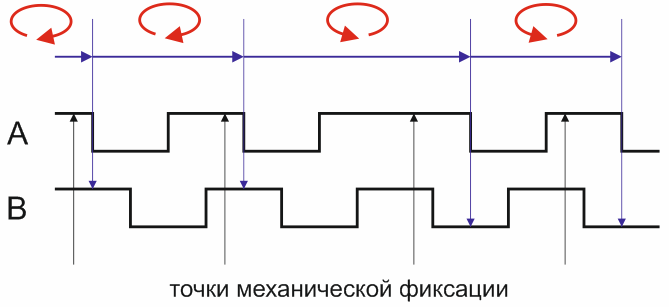
Какой сигнал мы получим? В зависимости от направления вращения логическая единица сначала появится на выводе A или B, таким образом мы получаем сдвинутый по фазе сигнал, а этот сдвиг позволяет определить в какую сторону. Сигнал получается в виде прямоугольной формы, а управление микроконтроллером происходит после обработки данных направления вращения и количества импульсов.
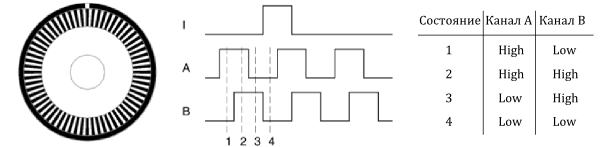
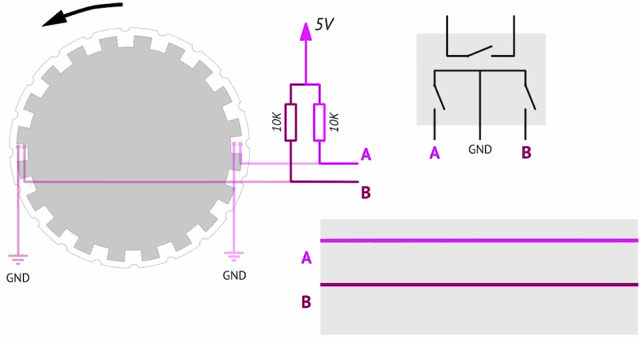
На рисунке изображено условное обозначение диска с контактами, по середине график выходных сигналов, а справа таблица состояний. Этот прибор часто рисуют как две клавиши, что логично, ведь фактически мы получаем сигнал вперед или назад, вверх или вниз, и количество воздействий.
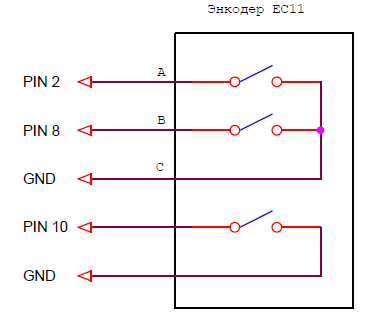
Вот пример цоколевки реального энкодера:
Интересно:
Неисправный энкодер можно заменить двумя кнопками без фиксации, и наоборот: самоделку управление в которой осуществляется двумя такими кнопками можно доработать, установив энкодер.
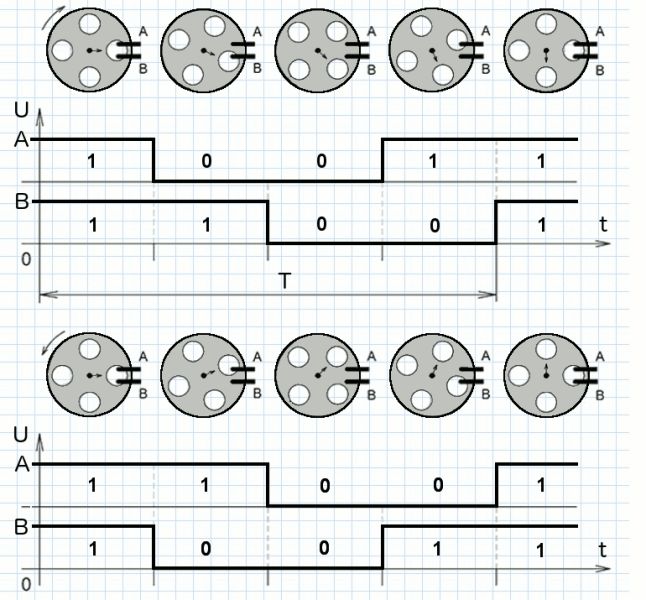
На видео ниже вы видите чередование сигнала на выводах – при плавных вращениях светодиоды загораются в последовательности отраженной на предыдущем графике.
Не менее наглядно это проиллюстрировано на следующей анимации (нажмите на рисунок):
Энкодер может быть и оптическим (сигнал формируется излучателями фотоприемниками, см. на рисунке ниже), и магнитным (работает на эффекте Холла). В таком случае у него нет контактов и больше срок службы.
Как уже было сказано, направление вращения можно определить по тому, какой из выходных сигналов раньше изменился, а вот так это выглядит на практике!
Точность управления зависит от разрешения энкодера – количества импульсов на оборот. Количество импульсов может быть от единиц до тысяч штук. Так как энкодер может выступать в качестве датчика положения, то чем больше импульсов – тем точнее будет происходить определение. Этот параметр обозначается как PPR – pulse per revolution.
Но есть небольшой нюанс, а именно похожее обозначение LPR – это количество меток на диске.
А количество обрабатываемых импульсов. Каждая метка на диске даёт 1 прямоугольный импульс на каждом из двух выходов. У импульса есть два фронта – задний и передний. Так как выхода два то с каждого из них мы в сумме получаем 4 импульса значения которых вы можете обработать.
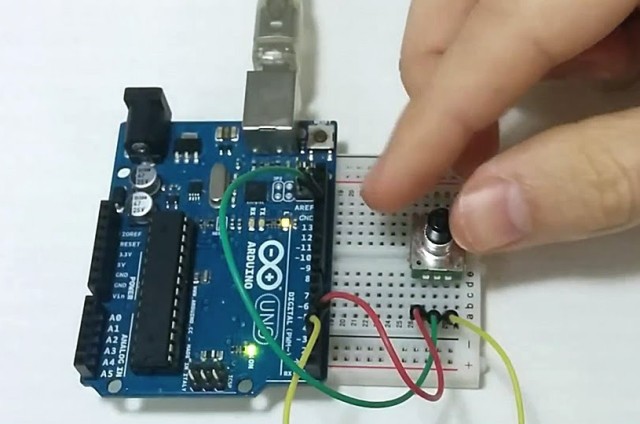
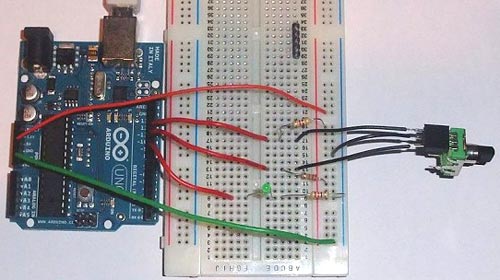
Подключаем к Arduino
Мы разобрались с тем что нужно знать об инкрементальном энкодере, теперь давайте узнаем, как подключить его к Ардуино. Рассмотрим схему подключения:
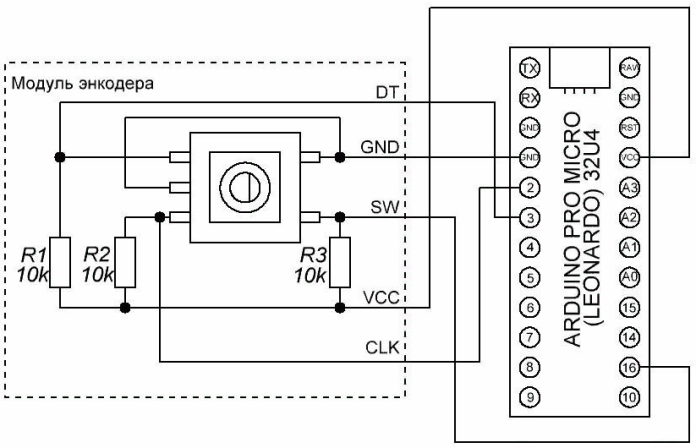
Модуль энкодера – это плата на которой расположен инкрементальный энкодер и подтягивающие резисторы. Пины можно использовать любые.
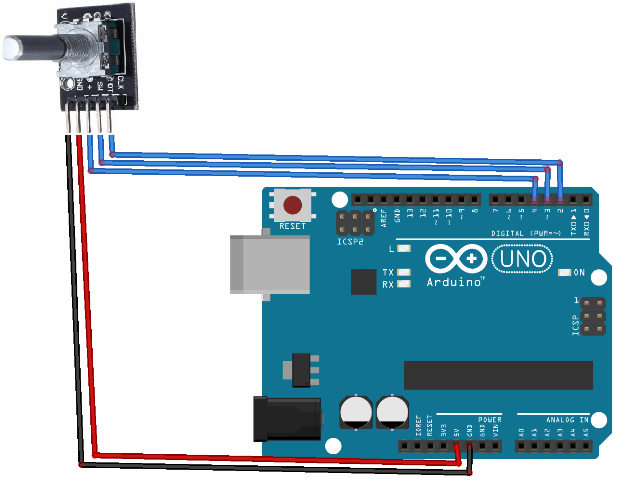
Если у вас не модуль, а отдельный энкодер, вам всего лишь нужно добавить эти резисторы, схема не будет ничем отличаться принципиально. Для проверки направления вращения и работоспособности его в связке с Ардуино мы можем прочитать информацию с последовательного порта.
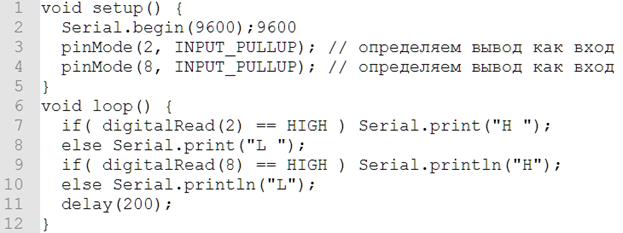
Разберем код подробнее, по порядку. В void setup() мы объявили что будем использовать связь через последовательный порт, а затем установили пины 2 и 8 в режим входа. Номера пинов выбираете сами исходя из вашей схемы подключения. Константа INPUT_PULLUP выставляет режим входа, у ардуино есть два варианта:

INPUT – вход без подтягивающих резисторов;
INPUT_PULLUP – подключение ко входу подтягивающих резисторов. Внутри микроконтроллера уже есть резисторы, через которые вход соединяется с плюсом питания (pullup).
Если вы используете резисторы для подтяжки к плюсу питания как изображено на схемах, приведенных выше или используете модуль энкодера – пользуйтесь командой INPUT, а если по какой-то причине не можете или не хотите использовать внешние резисторы – INPUT_PULLUP.
Логика основной программы следующая: если на входе 2 у нас единица – выдаёт в монитор порта H, если нет – L. Таким образом при вращении в одну сторону на мониторе последовательного порта получится что-то вроде этого: LL HL HH LH LL. А в обратную: LL LH HH HL LL.
Если вы внимательно прочли строки, то наверняка заметили, что в одном случае первый символ приобретал значение, а в другом случае сначала изменялся второй символ.
Заключение
Инкрементальные энкодеры нашли широкое практическое применение в усилителях для акустических систем – их использовали в качестве органа управления регулятора громкости, в автомагнитолах – для регулировки параметров звука и навигации по меню, в компьютерных мышках с его помощью вы ежедневно прокручиваете страницы (на его вале установлено колесико). А также в измерительных инструментах, ЧПУ станках, роботах, в сельсинах не только в качестве органов управления, но и измерения величин и определения положения.


Самый классический энкодерный модуль KY-040. Имеет 28 тиков на оборот, рукоятка является кнопкой (отдельный выход). Тип энкодера – 1 или 2 импульсный, китайцы могут прислать любой (о типах читайте ниже)

Более новый модуль, гораздо меньший процент брака. Имеет 28 тиков на оборот, рукоятка является кнопкой (отдельный выход). Тип энкодера – 2 импульсный.

Промышленный энкодер – надёжная и точная штука: металлический корпус, подшипниковый узел. Имеет 100, 200, 300, 360, 400, 600, 1000 тиков на оборот (на выбор). Тип энкодера – 2.
Подключается модуль энкодера очень просто: питание на питание (GND и VCC), логические пины CLK, DT (тактовые выводы энкодера) и SW (вывод кнопки) на любые пины Arduino (D или A). У круглых модулей выводы энкодера подписаны как S1 и S2, а вывод кнопки как Key, подключаются точно так же. От порядка подключения тактовых выводов энкодера зависит “направление” его работы, но это можно поправить в программе.
У модулей энкодера тактовые выводы подтянуты к питанию и дают низкий сигнал при срабатывании, также на них стоят RC цепи для гашения дребезга. Вывод кнопки никуда не подтянут! Промышленный энкодер подключается точно так же, чёрный и красный провода у него питание, остальные – тактовые выходы.
У модулей энкодеров тактовые выходы и кнопка подтянуты к питанию, у круглого модуля также стоят RC цепи для аппаратного подавления дребезга контактов, у KY-40 (прямоугольный) распаяна только подтяжка. Если нужно подключить “голый” энкодер к плате – в целом можно подключить напрямую без обвязки, как на схеме ниже, моя библиотека отработает и подтяжку средствами микроконтроллера (INPUT_PULLUP), и программный антидребезг. Но рекомендуется всё-таки делать RC цепи для кнопки и для тактовых выходов энкодера.


Голый энкодер без обвязки

Схема круглого модуля

RC цепь на выводы энка


Чем отличаются энкодеры на практике: если опрашивать одноимпульсный энкодер как двухимпульсный, то для отработки одного тика нужно повернуть рукоятку на два тика. Если опрашивать двухимпульсный как одноимпульсный, то для отработки одного тика нужно повернуть рукоятку на два тика. То есть при неправильном использовании причина сразу видна.
GyverEncoder v4.2
Я не нашёл в интернете нормальных библиотек для энкодера с хорошей функциональностью, поэтому написал свою, GyverEncoder. Что умеет:
- Отработка поворота рукоятки энкодера
- Обычный поворот
- “Нажатый поворот”
- “Быстрый” поворот
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции)
Версии
– 4.1
– Исправлено изменение подтяжек
– 4.2
– Добавлена поддержка TYPE1 для алгоритма PRECISE_ALGORITHM
– Добавлена отработка двойного клика: isSingle / isDouble
Документация
Инициализация
Объект энкодера может быть создан несколькими способами:
Опрос
Опрос энкодера происходит в методе .tick(), после чего можно узнать состояние энкодера из методов is*. Сам .tick() должен вызываться как можно чаще:
- В loop() – у вас должен быть “прозрачный” loop без задержек
- В прерывании таймера – достаточно опрашивать энкодер каждые 5 мс (зависит от скорости поворота)
- В аппаратном прерывании (достаточно завести одну таковую ногу энкодера)
Для “расшифровки” состояния энкодера используются следующие методы:
- isTurn(); // возвращает true при любом повороте, сама сбрасывается в false
- isRight(); // возвращает true при повороте направо, сама сбрасывается в false
- isLeft(); // возвращает true при повороте налево, сама сбрасывается в false
- isRightH(); // возвращает true при удержании кнопки и повороте направо, сама сбрасывается в false
- isLeftH(); // возвращает true при удержании кнопки и повороте налево, сама сбрасывается в false
- isFastR(); // возвращает true при быстром повороте
- isFastL(); // возвращает true при быстром повороте
Для кнопки энкодера:
- isPress(); // возвращает true при нажатии кнопки, сама сбрасывается в false
- isRelease(); // возвращает true при отпускании кнопки, сама сбрасывается в false
- isClick(); // возвращает true при нажатии и отпускании кнопки, сама сбрасывается в false
- isHolded(); // возвращает true при удержании кнопки, сама сбрасывается в false
- isHold(); // возвращает true при удержании кнопки, НЕ СБРАСЫВАЕТСЯ
- isSingle(); // возвращает true при одиночном клике (после таймаута), сама сбрасывается в false
- isDouble(); // возвращает true при двойном клике, сама сбрасывается в false
Примечание: isClick() возвращает true сразу же после отпускания кнопки, в то время как isSingle() возвращает true после таймаута, во время которого можно сделать второй клик и поймать уже двойной клик при помощи isDouble().
Настройки в скетче
Некоторые параметры работы энкодера можно настроить из программы:
- setType(type); // тип энкодера TYPE1 одношаговый, TYPE2 двухшаговый. Если ваш энкодер работает странно, смените тип
- setTickMode(tickMode); // MANUAL / AUTO – ручной или автоматический опрос энкодера функцией tick(). (по умолчанию ручной)
- setDirection(direction); // NORM / REVERSE – направление вращения энкодера
- setFastTimeout(timeout); // установка таймаута быстрого поворота
- setPinMode(mode); // тип подключения пинов энкодера, подтяжка HIGH_PULL (внутренняя) или LOW_PULL (внешняя на GND)
- setBtnPinMode(mode); // тип подключения кнопки, подтяжка HIGH_PULL (внутренняя) или LOW_PULL (внешняя на GND)
Настройки в библиотеке
В заголовочном файле библиотеки (GyverEncoder.h) есть несколько дополнительных настроек:
- ENC_DEBOUNCE_TURN 1 – время антидребезга для энкодера, миллисекунд
- ENC_DEBOUNCE_BUTTON 80 – время антидребезга для кнопки, миллисекунд
- ENC_HOLD_TIMEOUT 700 – таймаут удержания кнопки, миллисекунд
- ENC_DOUBLE_TIMEOUT 300 – таймаут двойного клика
- #define ENC_WITH_BUTTON // если закомментировать данную строку, опрос кнопки будет полностью “убран” из кода, что сделает его легче и чуть быстрее
- #define DEFAULT_ENC_PULL LOW_PULL // тип подключения энкодера по умолчанию (LOW_PULL или HIGH_PULL)
- #define DEFAULT_BTN_PULL HIGH_PULL // тип подключения кнопки энкодера по умолчанию (LOW_PULL или HIGH_PULL)
Алгоритмы опроса энкодера
Алгоритм работы библиотеки можно выбрать в заголовочном файле библиотеки (GyverEncoder.h), для этого нужно раскомментировать одну из строк с дефайнами алгоритмов:
- #define FAST_ALGORITHM // быстрый, не справляется с люфтами
- #define BINARY_ALGORITHM // медленнее, лучше справляется с люфтами
- #define PRECISE_ALGORITHM // медленнее, но работает даже с убитым энкодером (по мотивам https://github.com/mathertel/RotaryEncoder)
Работа с “виртуальным” энкодером
Версия библиотеки 4+ поддерживает работу с виртуальным энкодером, т.е. алгоритм опрашивает не напрямую цифровой пин микроконтроллера, а логическую величину, которую ему передадут. Таким образом можно попробовать опрашивать несколько энкодеров, подключенных через расширитель пинов. Для работы с таким энкодером нужно инициализировать энкодер без указания пина:
Работа с таким энкодером ничем не отличается от обычного, кроме метода tick() – в него нужно передать состояния тактовых пинов энкодера (CLK и DT), а также пина кнопки (опционально):
Смотрите пример external_enc в папке с примерами

В очередном уроке мы рассмотрим работу Arduino с энкодером (который служит для преобразования угла поворота в эл. сигнал). С энкодера мы получаем 2 сигнала (А и В), которые противоположны по фазе. В данном уроке мы будем использовать энкодер фирмы SparkFun COM-09117, который имеет 12 положений на один оборот (каждое положение 30°). На приведенной ниже диаграмме вы можете видеть, как зависят выход А и В друг от друга при вращении энкодера по часовой или против часовой стрелки.
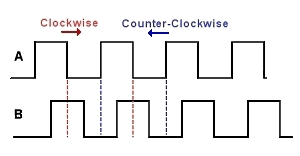
Каждый раз, когда сигнал А переходит от положительного уровня к нулю, мы считываем значение выхода В. Если В в этот момент находится в положительном состоянии, значит энкодер вращается по часовой стрелке, если В нуль, то энкодер вращается против часовой стрелки. Считывая оба выхода, мы при помощи МК можем определить направление вращения, и при помощи подсчета импульсов с А выхода угол поворота. Конечно можно пойти еще дальше и при помощи вычисления частоты, можно определить насколько быстро происходит вращение энкодера. Как вы видите, энкодер имеет много преимуществ по сравнению с обычным потенциометром.
Используя энкодер мы будем управлять яркостью LED светодиода при помощи ШИМ выхода. Для считывания данных энкодера мы будем использовать простейший метод, основанный на программных таймерах, которые мы изучали в третьем уроке.
Как было сказано выше, мы будем использовать энкодер sparkfun. Первое, что необходимо сделать, это определить как часто нам нужно обращаться к выходам энкодера для считывания значений. Итак, представим себе, что в лучшем случае, мы можем повернуть ручку энкодера на 180° за 1/10 сек, т.е. это будет 6 импульсов за 1/10 сек или 60 импульсов в секунду. В реальности быстрее вращать не сможете. Т.к. нам необходимо отслеживать все полупериоды, то частота должна быть минимум 120 Герц. Для полной уверенности, давайте примем 200 Гц. (Примечание: т.к. у нас механический энкодер, то возможен дребезг контактов, а низкая частота позволяет отфильтровывать дребезг).
По сигналам программного таймера нам необходимо постоянно сравнивать текущее значение выхода А энкодера с предыдущим значением. Если состояние изменилось от положительного к нулю, то мы проверяем значение выхода В и смотрим положительное оно или нет. В зависимости от полученного результата мы увеличиваем или уменьшаем счетчик значения яркости светодиода.
Программа для данного урока приведена ниже. Она построена на базе предыдущего урока Fade, где использовалась функция millis() для задания временных интервалов. Временной интервал у нас будет 5 мс (200 Гц)
Источник: