










Arduino библиотека AccelStepper для шагового двигателя HobbyTech
 Библиотека AccelStepper для Arduino позволяет управлять шаговыми двигателями и, в отличие от стандартной библиотеки Stepper, имеет следующие преимущества:
Библиотека AccelStepper для Arduino позволяет управлять шаговыми двигателями и, в отличие от стандартной библиотеки Stepper, имеет следующие преимущества:
- поддержка ускорения и замедления
- поддержка одновременной работы нескольких шаговых двигателей с независимой работой каждого
- неблокирующие функции
- поддержка различных типов шаговых двигателей и микрошаговых режимов
- поддержка Adafruit Motor Shield
- поддержка SparkFun EasyDriver
- поддержка очень маленьких скоростей
- поддержка подклассов
Последнюю версию документации можно загрузить по ссылке (eng).
Рассмотрим основные функции AccelStepper:
Определение и конфигурация моторов
Шаговый двигатель, управляемый выделенной платой.
Биполярный шаговый двигатель, управляемый Н-мостом.
Униполярный двигатель, управляемый четырмя транзисторами.
Установка максимальной скорости. Скорость по умолчанию очень низкая, так что её требуется переопределить. При движении шаговый двигатель будет ускоряться до этой максимальной скорости и замедляться при подходе к концу движения.
Установка ускорения, в шагах в секунду за секунду.
Управление положением
Переместиться в абсолютно указанное положение. Само движение запускается функцией run().
Переместиться в относительно указанное положение. Само движение запускается функцией run(). Значение distance может быть больше или меньше нуля.
Вернуть текущее абсолютное положение.
Вернуть расстояние до указанного положения. Может использоваться для проверки, достиг ли двигатель указанной конечной точки.
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Начать движение и подождать когда двигатель достигнет указанной точки. Функция не осуществляет возврата пока двигатель не остановится.
Управление скоростью
Установить скорость в шагах за секунду. Само движение запускается функцией runSpeed().
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Пример использования библиотеки AccelStepper
В нашем примере шаговые двигатели подключены к плате Arduino Uno через драйверы A4988.
Управление Ардуино шаговым двигателем от принтера
В этом уроке вы узнаете, как управлять с помощью Ардуино шаговым двигателем, который был взят от старого принтера.

Шаг 1. Что такое шаговый двигатель?
Шаговый двигатель состоит из двух основных частей: ротора и статора.

Ротор является частью двигателя, который фактически вращается и обеспечивает работу. Статор представляет собой неподвижную часть двигателя, в котором размещается ротор. В шаговом двигателе ротор представляет собой постоянный магнит. Статор состоит из нескольких катушек, которые действуют как электромагниты, когда через них проходит электрический ток. Электромагнитная катушка заставит ротор выровняться вместе с ним при зарядке. Ротор приводится в движение путем чередования тока на катушках, протекающий через них.
Шаговые двигатели имеют ряд преимуществ. Они дешевы и просты в использовании. Когда ток не поступает в двигатель, ничего не происходит. Шаговые двигатели также могут вращаться без ограничений и изменять направление в зависимости от установленной полярности.
Шаг 2: Список деталей
Необходимые детали для проекта Ардуино шагового двигателя:
- Шаговый двигатель (этот двигатель был взят от старого принтера)
- Arduino
- Изолированный медный провод
- Проволочные резаки / стрипперы
- Регулятор тока
- транзистор
- драйвер двигателя H-Bridge 1A
- моторный шилд
- паяльник
- припой
- инструменты
- безопасные очки
Шаг 3: Присоединяем провода



Большинство шаговых двигателей имеют четыре провода, поэтому вам нужно будет обрезать четыре медных провода (обратите внимание, что цвет не коррелирует с чем-либо конкретным (обычно есть правило, что черный — это земля, но не сейчас). Различные цвета были использованы только для облегчения понимания. Эти выводы будут использоваться для управления, какая катушка в настоящее время активна в двигателе. Для этого проекта Ардуино шаговый двигатель был взят от старого принтера, поэтому пайка проводов была самым простым вариантом для этого проекта. В любом случае, вы можете безопасно установить соединение (пайка, штекер, клипы).
Шаг 4: Эскиз/скетч Arduino



Arduino уже имеет встроенную библиотеку для шаговых двигателей. Просто перейдите в меню:
Файл → Примеры → Шаговые → stepper_oneRevolution
File → Examples → Stepper → stepper_oneRevolution
Затем вам нужно изменить переменную stepsPerRevolution, чтобы она соответствовала вашему конкретному двигателю. После просмотра номера деталей двигателей в Интернете наш конкретный двигатель был рассчитан на 48 шагов для завершения одного оборота.
То, что на самом деле делает Stepper: чередует сигналы HIGH и LOW для каждой катушки, как показано в анимации выше.
Шаг 5: Что такое мост H-bridge?


H-Bridge — схема, состоящая из 4 переключателей, которые могут безопасно управлять двигателем постоянного тока или шаговым двигателем. Эти переключатели могут быть реле или (чаще всего) транзисторами. Транзистор представляет собой твердотельный переключатель, который можно закрыть, посылая небольшой ток (сигнал) на один из его контактов.
В отличие от одного транзистора, который позволяет вам контролировать скорость двигателя, H-мосты позволяют вам также контролировать направление вращения двигателя. Он делает это, открывая различные переключатели (транзисторы), чтобы ток тек в разных направлениях и, таким образом, изменяя полярность на двигателе.
H-Bridges может помочь вам предотвратить перегорания вашего Arduino моторами, которыми вы пользуетесь. Двигатели являются индукторами, а это означает, что они хранят электрическую энергию в магнитных полях. Когда ток больше не посылается двигателям, магнитная энергия возвращается в электрическую энергию и может повредить компоненты. H-Bridge помогает изолировать ваш Arduino лучше всего. Вы не должны подключать двигатель непосредственно к Arduino.
Хотя H-Bridges можно легко сделать самому многие предпочитают покупать H-Bridge (например, чип L293NE / SN754410) из-за удобства. Это чип, который мы будем использовать в этом уроке. Физические номера контактов и их назначение ниже:
- Пин 1 (1, 2EN) → Мотор 1 Включен/Выключен (HIGH/LOW)
- Пин 2 (1A) → Мотор 1 логический выход 1
- Пин 3 (1Y) → Мотор 1 терминал 1
- Пин 4 → Земля
- Пин 5 → Земля
- Пин 6 (2Y) → Мотор 1 терминал 2
- Пин 7 (2A) → Мотор 1 логический выход 2
- Пин 8 (VCC2) → Питание для двигателей
- Пин 9 → Мотор 2 Включен/Выключен (HIGH/LOW)
- Пин 10 → Мотор 2 логический выход 1
- Пин 11 → Мотор 2 терминал 1
- Пин 12 → Земля
- Пин 13 → Земля
- Пин 14 → Мотор 2 терминал 2
- Пин 15 → Мотор 2 логический выход 2
- Пин 16 (VCC1) → Питание для H Bridge (5В)
Шаг 6: Схема соединения
Схема соединения нашего проекта Ардуино шагового двигателя ниже.




Для шагового двигателя Ардуино 4 вывода на H-Bridge должны подключаться к 4 выводам двигателя. Затем 4 логических вывода подключаются к Arduino (8, 9, 10 и 11). Как показано на диаграмме выше, для питания двигателей можно подключить внешний источник питания. Чип может обрабатывать внешний источник питания от 4,5 до 36 В (мы выбрали батарею 9В).
Шаг 7: Загрузка кода и тестирование
Загрузите свой код в Ардуино. Если вы запустите свой код и все сработает так, как ожидалось, это потрясающе! Если провода вставлены в неправильные контакты, двигатель просто вибрирует, а не полностью вращается. Играйте со скоростью и направлением двигателя, как сочтете нужным.
На этом всё, теперь у вас должен быть рабочий шаговый двигатель Arduino. То, что вы сделаете дальше, зависит только от вас.
Как подключить шаговый двигатель к Arduino Uno?

На производстве иногда применяют станки ЧПУ (Числовое Программное Управление). Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя (ШД). Правда, связка — шаговый двигатель и Ардуино — это далеко не идеальный вариант (не для серьёзных объектов). Но всё-таки призываю обратить внимание.
Из этой статьи вы узнаете:
Доброго дня уважаемые друзья, коллеги, будущие партнёры и гости. Я снова на связи. С вами Гридин Семён. Сегодня мы рассмотрим интересную тему. Это соединение шагового двигателя с популярной электронной платой Arduino. Так что готовьте чай и читайте статью.
Работа шагового двигателя и описание драйвера
Как работает шаговик?
Для практических задач с точным перемещением объекта обязательно требуется ШД. Это мотор, который перемещает свой вал в зависимости от заданных шагов в программе контроллера. Чаще всего их применяют в станках ЧПУ, робототехнике, манипуляторах, 3D-принтерах.
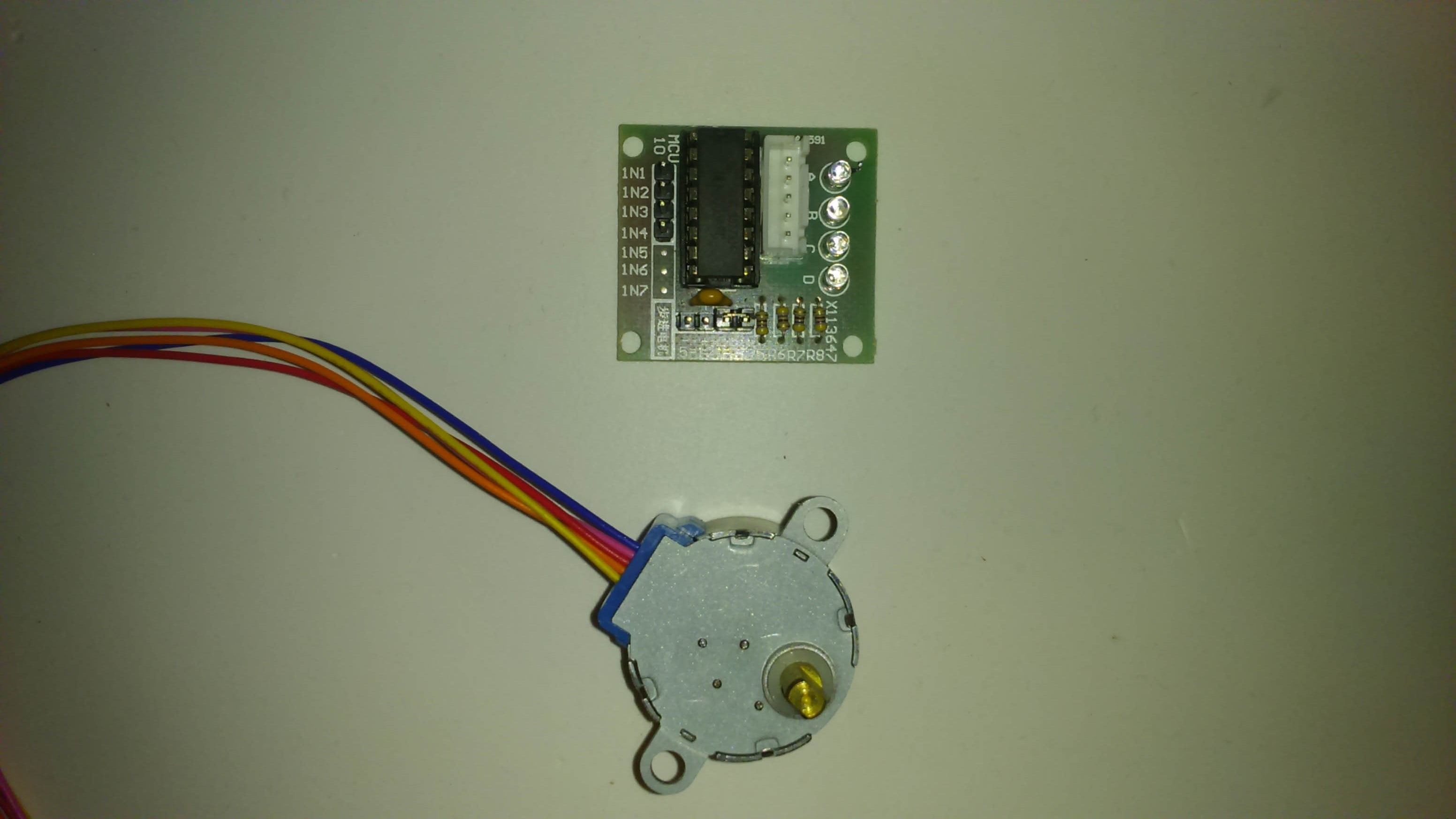
Мы же с вами рассмотрим конкретный двигатель 28BYj-48 с драйвером управления ULN2003 . Он достаточно дешёвый, прост в сборке и легко писать программу.
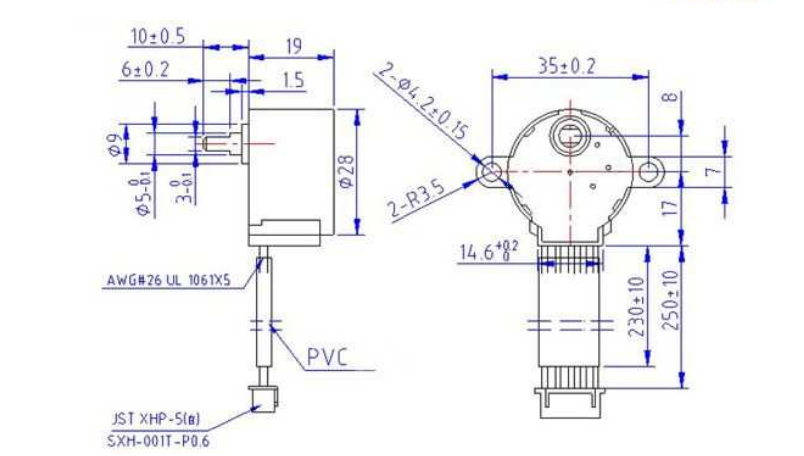
В 4-шаговом режиме он может совершать 2048 шагов, в 8-шаговом 4096 шагов. Питание 5 В, ток потребления 160 мА. Передаточное число 1:64 , то есть один шаг он совершит на 5,625 градусов. Крутящий момент составляет 34 мН.м. Средняя скорость 15 об/мин, с помощью программного кода можно ускорить до 35 об/мин, но вы должны понимать, что мы при этом теряем мощность и точность.
Размеры двигателя указаны из первоисточника — даташита производителя Kiatronics.
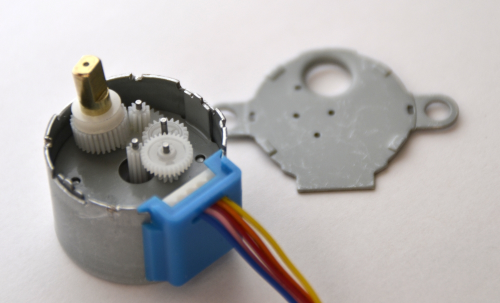
А вот таким образом он выглядит изнутри:
Для небольших технических проектов — 28BYj-48 идеальный вариант. Его главным преимуществом является дешевизна и простота. Прилагаю спецификацию:
8-шаговая управляющая сигнальная последовательность — 5.625º/шаг
ШД имеет четыре обмотки, которые запитываются последовательно:
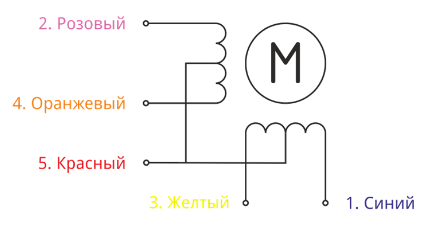
Для того, чтобы заставить мотор двигаться по часовой стрелке, нужно попеременно подавать на обмотки напряжение. Движок работает в двух режимах в шаговом и полушаговом, чем они отличаются, мы сейчас разберём.
1.Шаговый режим — это когда две из четырех обмоток запитываются на каждом шаге. Смотрите карту включения обмоток: Для этого способа используется my Stepper.h.
| Провод | Фазы для шагового режима | |||
| 1 | 2 | 3 | 4 | |
| 4 оранжевый | ||||
| 3 желтый | ||||
| 2 розовый | ||||
| 1 синий | ||||
2.Полушаговый режим — это когда запитывается первая обмотка, потом вторая и третья вместе, потом четвёртая и т.д. В Даташите разработчика указано, что предпочтительнее режим полушага для мотора. Подробно изображено на карте подключений:
| Провод | Фазы для полушагового режима | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| 4 оранжевый | ||||||||
| 3 желтый | ||||||||
| 2 розовый | ||||||||
| 1 синий | ||||||||
Описание драйвера ULN2003
Плата представляет собой силовой модуль, который содержит в себе семь независимых транзисторов Дарлингтона. Каждая пара представляет собой каскад из двух биполярных транзисторов. ULN2003 является неким усилителем с током нагрузки 500 мА и напряжением 50 В. На изображении отображена сама плата и описание выводов к ней.

Управляющие входы IN1,IN2,IN3,IN4 подключаются к любым дискретным выводам Arduino Uno. Если кому интересно, можете прочитать статью здесь . Светодиоды отображают, какой шаг совершил двигатель. Выводы для подключения внешнего источника питания. Рекомендую запитывать отдельной батареей, так как нагрузка может возрастать до 1 А. Только не забудьте переставить джампер на внешнее питание двигателя.
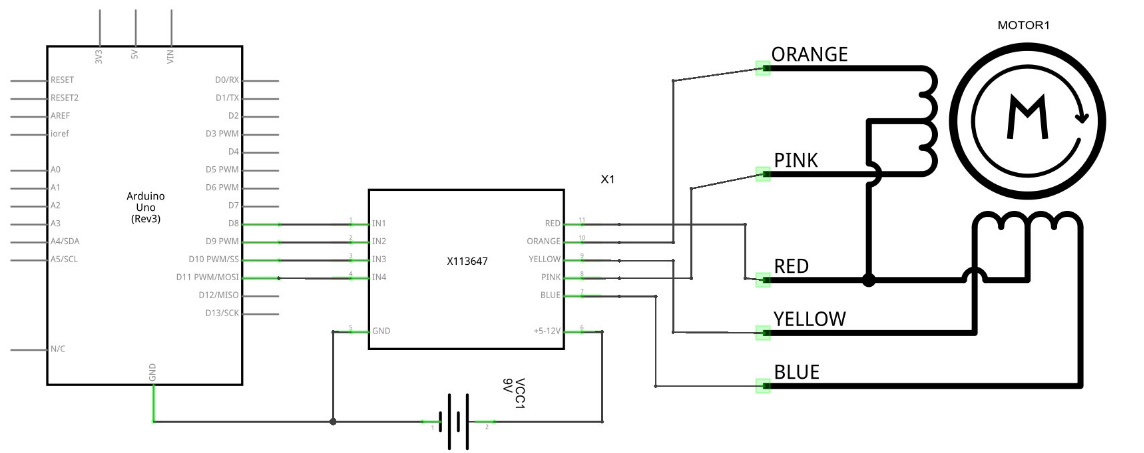
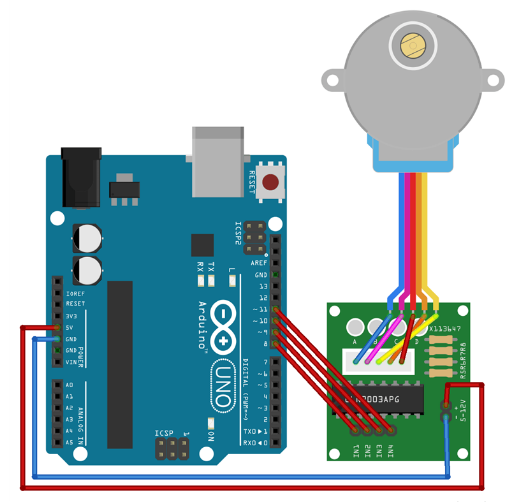
Схема сборки на Fritzing
Для использования в учебных проектах я рекомендую Arduino Uno . Схему подключений я представляю в двух вариантах: принципиальной и визуальной схеме.
Описание библиотеки AccelStepper
Давайте мы перейдём к интересной части нашей статьи. Это описание двух библиотек для работы с двигателями myStepper и AccelStepper. Больше буду обращать внимание на хранилище AccelStepper, так как у нее больше функции, а именно:
- есть возможность управлять скоростью,
- поддержка различных шаговиков
- поддержка одновременно работающих двигателей
Определение конфигурации моторов
AccelStepper mystepper (1, pinStep, pinDirection);
Для управления шаговым двигателем.
AccelStepper mystepper (2, pinA, pinB);
Биполярный ШД, управляемый Н-мостом.
AccelStepper mystepper (4, pinA1, pinA2, pinB1, pinB2);
Униполярный мотор, управляемый четырмя транзисторами.
Максимальная скорость двигателя. Скорость заведомо низкая. Сначала моторчик ускоряется до этой скорости, затем снижает её
Ускорение шаговика, в шагах в секунду.
Управление положением
Переместиться в абсолютно указанное положение. Само движение запускается функцией run ().
Переместиться в относительно указанное положение. Само движение запускается функцией run (). Значение distance может быть больше или меньше нуля.
Вернуть текущее абсолютное положение.
Вернуть расстояние до указанного положения. Может использоваться для проверки, достиг ли моторчик указанной конечной точки.
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Начать движение и подождать когда двигатель достигнет указанной точки. Функция не осуществляет возврата пока он не остановится.
Управление скоростью
Установить скорость в шагах за секунду. Сам процесс запускается функцией runSpeed ().
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Как видите функции управления в принципе не сложны, достаточно посидеть несколько вечеров.
Описание кода программы
Я выложу для вас простой код, который будет достаточно скопировать и добавить в Ардуино IDE. О том, как программировать в этой среде я писал статью . Все описания строчек кода я написал в комментариях.
Источник: antishubohat.ru