










Микропроцессорные системы
Содержание
- Общие сведения о микропроцессорных системах
- Основные типы микропроцессорных систем
- Архитектура Фон-Неймана
- Гарвардская архитектура
Микропроцессорная система (МПС) представляет собой систему, включающую в себя хотя бы 1 микропроцессор (МП), запоминающее устройство (ЗУ), устройства ввода/вывода (УВВ), устройства сопряжения системной шины с устройствами ввода/вывода (контроллеры), системную шину.
Данную систему можно рассматривать как пример электронной системы, которая предназначена для обрабатывания входных сигналов и выдачи выходных сигналов. В роли входных и выходных сигналов возможно использование аналоговых сигналов, одиночных цифровых сигналов, цифровых кодов, последовательности цифровых кодов. В данной системе, как в любой цифровой системе, входные аналоговые сигналы преобразуют в последовательности кодов с помощью аналогово-цифровых преобразователей (АЦП), а выходные аналоговые сигналы формируют из последовательности кодов с помощью цифровых аналоговых преобразователей (ЦАП). Обрабатывается и хранится информация в цифровом виде.
Общие сведения о микропроцессорных системах
В связи с множеством областей применения МП и микроЭВМ можно классифицировать МПС на системном уровне. Они могут быть представлены:
- встроенными системами контроля и управления;
- локальными системами накопления и обработки информации;
- распределенными системами управления сложными объектами;
- распределенными высокопроизводительными системами параллельных вычислений.
Исходя из вышесказанного, в наше время определились следующие приоритетные области, в которых применяются МПС:
- техника связи;
- системы управления;
- бытовая и торговая аппаратура;
- контрольно-измерительная аппаратура;
- военная техника;
- вычислительные машины, системы, комплексы и сети;
- транспорт.
Процесс внедрения МПС в область контрольно-измерительной аппаратуры позволил значительно повысить точность измерений и надежность, а также расширил функциональные возможности приборов и обеспечил выполнение следующих функций: калибровки, коррекции и температурной компенсации, контроля и управления измерительным комплексом, принятия решений и обработки данных, диагностики неисправностей, индикации, испытания и проверки приборов.

Готовые работы на аналогичную тему
Внедрение МПС в системах связи обусловило все большее вытеснение цифровыми методами аналоговых, что привело к их широкому использованию в преобразователях кодов, мультиплексорах, устройствах контроля ошибок, блоках управления приемной и передающей аппаратуры.
Все более широко стали использоваться МПС в таких устройствах, как терминалы и кассовые аппараты банков, контрольно-расчетные терминалы торговых центров и т.п. Использование МП и МПС в бытовой технике позволяет открыть ее широкие возможности в области эффективности, повышения надежности и разнообразного применения.
Применение МПС в разных областях военной техники растет ежегодно — от навигационных систем летательных аппаратов до управления движением транспортных роботов.
Основные типы микропроцессорных систем
Различают следующие основные типы МПС:
- микроконтроллеры представляют собой наиболее простой тип, в котором все или большинство узлов системы представлены в виде одной микросхемы;
- контроллеры являются управляющими МПС, выполненными в виде отдельных модулей;
- микрокомпьютеры — более мощные МПС, имеющие развитые средства сопряжения с внешними устройствами;
- компьютеры любого типа представляют собой самые мощные и наиболее универсальные МПС.
Четкую границу между названными типами иногда провести достаточно сложно, поскольку быстродействие всех типов МП постоянно растет, и бывает, что новый микроконтроллер может оказаться быстрее, к примеру, устаревшего компьютера. Но принципиальные отличия между ними все же существуют.
Микроконтроллеры являются универсальными устройствами, практически всегда использующимися в составе более сложных устройств, в том числе и контроллеров. Системная шина микроконтроллера находится внутри микросхемы. Возможности подключения внешних устройств к микроконтроллеру ограничены. Устройства, построенные на микроконтроллерах, как правило, используются для выполнения одной задачи.
Контроллеры обычно создают для решения отдельной задачи или группы близких задач. Они не имеют возможности подключения дополнительных узлов и устройств (большой памяти, средств ввода/вывода). Их системная шина, как правило, недоступна для пользователя. По структуре контроллер прост и оптимизирован под максимальное быстродействие. В основном выполняемые им программы хранятся в постоянной памяти и не меняются. Конструктивно контроллеры выпускаются в виде одной платы.
Микрокомпьютеры отличает от контроллеров более открытая структура, поскольку в них допускается подключение к системной шине нескольких дополнительных устройств. Выпускаются микрокомпьютеры в каркасе, корпусе с разъемами системной магистрали, которые доступны для пользователя. Микрокомпьютеры имеют средства хранения информации на магнитных носителях (магнитные диски) и развитые средства связи с пользователем (видеомонитор, клавиатуру). Микрокомпьютеры предназначены для решения более широкого круга задач, чем контроллеры, однако к каждой новой задаче их нужно приспосабливать заново. Программы, выполняемые микрокомпьютером, можно легко заменять.
Компьютеры, в том числе и персональные, представляют собой самые универсальные из МПС. В них предусмотрена возможность усовершенствования, а также широкие возможности подключения новых устройств. Системная шина компьютеров является доступной для пользователя. Помимо этого внешние устройства (ВУ) имеют возможность подключения к компьютеру через несколько встроенных портов связи (количество портов может доходить до 10). Компьютер обладает высоко развитыми средствами связи с пользователем, средствами длительного хранения информации большого объема, средствами связи с другими компьютерами по информационным сетям. Области применения компьютеров самые разнообразные: от математических расчетов и обслуживания доступа к БД до управления работой сложных электронных систем, компьютерных игр и т.д.
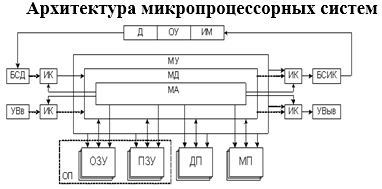
Рисунок 1. Логическая схема МПС
где Д – датчики, ОУ – объект управления, ИМ – исполнительные механизмы, БСД – блок сопряжения с датчиками, ИК – информационные контроллеры, БСИК – блок сопряжения с информационными контроллерами, ОП – основная память, ДП – дополнительная память В зависимости от области применения МПС бывают специализированные и универсальные, встроенные и автономные.
Архитектура Фон-Неймана
В соответствии с организацией процессов выборки и исполнения команды в современных МПС применяют одну из двух архитектур: фон-неймановскую (принстонскую) или гарвардскую.
Основная особенность архитектуры Фон-Неймана заключается в использовании общей памяти для хранения программ и данных.
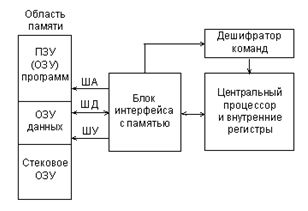
Рисунок 2. Структура МПС архитектуры Фон-Неймана
Основным преимуществом данной архитектуры является упрощение устройства МПС, поскольку реализовано обращение только к одной общей памяти. Помимо этого использование единой области памяти позволило оперативно перераспределить ресурсы между областями программ и данных, что существенно повысило гибкость МПС со стороны программного обеспечения. Размещение стека в общей памяти облегчило доступ к его содержимому. Поэтому данный тип архитектуры стал основным для универсальных компьютеров, в том числе и персональных.
Гарвардская архитектура
Основная особенность гарвардской архитектуры заключается в использовании раздельных адресных пространств для хранения команд и данных, как изображено на рис. 3.
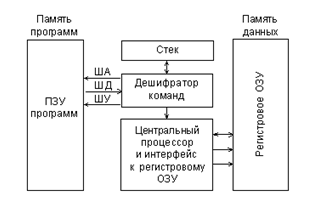
Рисунок 3. Структура МПС с гарвардской архитектурой
Гарвардской архитектурой обеспечивается потенциально более высокая скорость выполнения программ в сравнении с фон-неймановской за счет возможности реализовывать параллельные операции. Процесс выборки следующей команды может проходить параллельно выполнению предыдущей. Данный метод реализации операций дает возможность обеспечивать выполнение различных команд за одинаковое число тактов, что дает возможность более просто определить время выполнения циклов и критичных участков программы.
Источник: