










Расчет мощности электродвигателя
Содержание
- Как выбрать электродвигатель
- Синхронные электрические машины
- Двигатели постоянного тока
- Асинхронные электрические машины
- Как рассчитать мощность электродвигателя
Если вы задались целью создать электрический привод, например, собственную мельницу, насосную станцию, транспортерную ленту или другое полезное в хозяйстве устройство, вам надо найти или купить электродвигатель и убедиться в том, что его мощность соответствует поставленным задачам.
Сегодня мы осветим некоторые аспекты, касающиеся устройства и рабочих качеств электрических машин, что поможет вам сделать правильный выбор.
Как выбрать электродвигатель
Подбор электродвигателя стоит начать со знакомства с типами электрических машин. Основное их отличие состоит в способе взаимодействия магнитных полей статора и ротора. По этому признаку они делятся на два типа:
Синхронные электрические машины
У них магнитное поле статора и ротора создается внешними источниками, они независимы друг от друга, их смена положения их полюсов происходит синхронно.
Двигатели постоянного тока
Исходя из принципа механики Ньютона, утверждающего, что всякое движение относительно, электродвигатель постоянного тока можно назвать синхронной машиной. Хотя магнитные поля статора и ротора в ней неподвижные, а вращение вала происходит за счет эффекта отталкивания одноименных полюсов магнитов и притягивания разноименных.
Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.
На них через угольные щетки подается постоянный ток. Во время вращения вала происходит переключение полюсов между парами. Магнитное поле статора может создаваться металлами с остаточным магнетизмом или прохождением тока по обмоткам. Последние применяются в электрических машинах большой мощности.
Их достоинством является большой коэффициент полезного действия, до 98%, а также стабильно высокий вращающий момент и малая зависимость от перегрузок. Двигатели постоянного тока отлично подходят для привода подъемных механизмов, а также в качестве тяговых на электротранспорте.

Ими очень просто управлять: для снижения скорости вращения надо лишь уменьшить величину подаваемого напряжения, а для реверсирования достаточно сменить полярность. Недостатком является сложность устройства и невысокая надежность щеточного узла, его склонность к искрению и шумность. Кроме того, постоянное напряжение сложно передавать на большие расстояния, из-за чего нет магистральных линий такого типа. Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь.
Коллекторные двигатели
По своей конструкции они аналогичны двигателям постоянного тока. Однако питаются переменным однофазным током. Статорная обмотка возбуждения у них включена последовательно с обмоткой якоря. Вращение вала происходит за счет синхронной смены полюсов магнитного поля в статорной и роторной обмотках.
К перечисленным выше достоинствам – большому вращающему моменту, нечувствительности к перегрузкам, стоит отнести и то, что это единственная электрическая машина переменного тока, которой можно без проблем управлять.
Для изменения скорости вращения вала достаточно уменьшить питающее напряжение, а для реверсирования поменять местами точки подключения коллекторного узла со статорной обмоткой. Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах.
Например, в стиральных машинах, дрелях и другом электрифицированном инструменте. К недостаткам, основным из которых является сложность и малая надежность щеточного узла, стоит отнести и невозможность подключения трехфазного напряжения. Просто потому, что в этом случае щеток должно быть шесть. Это ограничивает максимальную мощность двигателей: у однофазных машин при напряжении 220 вольт это значение не бывает более 2,5 киловатта.
Синхронные электродвигатели переменного тока
У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.
Недостатками – сложность пуска и наличие коллектора со щеточным узлом, что снижает их надежность. А также невозможность регулирования частоты вращения. Применяются в установках, которые работают постоянно или с очень длительным рабочим циклом. Например, на перекачивающих станциях или транспортерных лентах.
Узнать больше об электродвигателях можно узнать в нашей статье Электрический двигатель: виды и характеристики.
Асинхронные электрические машины
В них магнитное поле ротора является порождением вращающегося магнитного поля статора. Поскольку между этими деталями машины есть воздушный зазор, передача энергии между ними происходит с потерями. Поэтому фаза тока в роторе отстает от фазы тока в статоре на небольшой угол (не более 100), который определяет величину коэффициента мощности cosφ. Это отставание и является причиной того, что электрическую машину этого типа называют асинхронной.
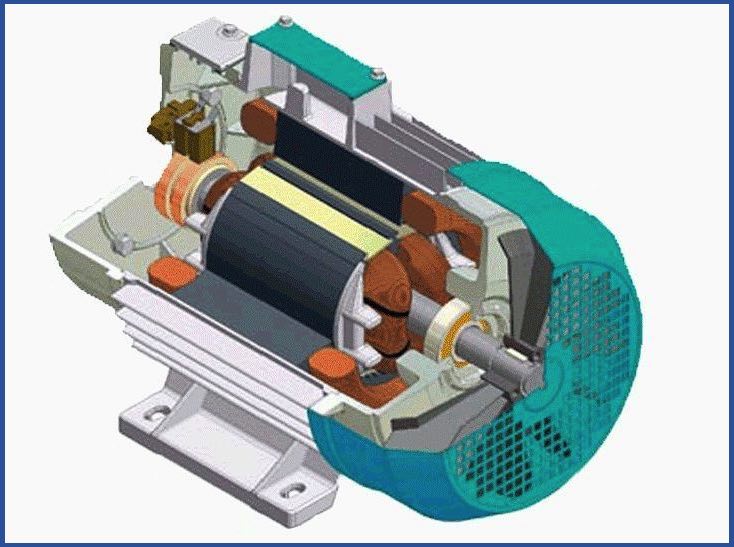
Двигатели с короткозамкнутым ротором
Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.

После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.
Для изменения скорости вращения необходимо менять частоту питающего напряжения или количество статорных обмоток, которое определяет количество полюсов электромагнита – чем их больше, тем она ниже. Также электродвигателям с короткозамкнутым ротором свойственен большой пусковой ток, перегружающий сеть, а также резкий рост вращающего момента при подключении питания, что может вызвать поломку редуктора привода.
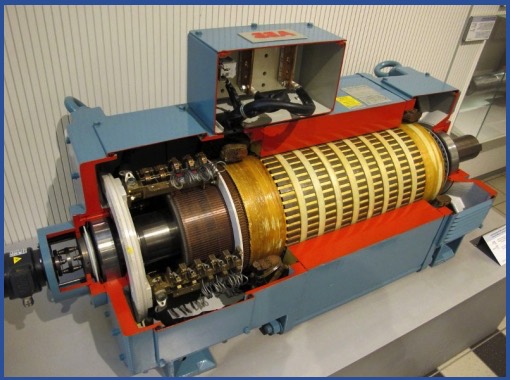
Двигатели с фазным ротором
Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети. Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.
 В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%.
Как рассчитать мощность электродвигателя
При расчете мощности электродвигателя надо ориентироваться на потребности обеспечиваемого технологического процесса. В Сети так много методичек для определения этого параметра, что вы можете запутаться окончательно. Предлагаем вам довольно простую универсальную формулу, пригодную для любых случаев.
P – мощность электродвигателя. Т – потребный вращающий момент на валу, а Ω – угловая скорость.
Ft– потребное тяговое усилие, оно рассчитывается по формуле: Ft= t ∙ M ∙ 2.5, где t – коэффициент трения (для подшипников качения он равен 0.02), М – масса перемещаемого груза, а 2.5 – это коэффициент Ньютона. R – радиус рабочего органа, например, крыльчатки насоса.
Ω = π ∙ n / 30, где π = 3.14, а n – паспортная частота вращения приводимого в действие устройства.
Полученное значение лучше увеличить в 1,5 раза, чтобы предусмотреть возможные перегрузки во время работы привода.
При расчете рабочего тока электродвигателя необходимо учитывать, что при соединении обмоток статора асинхронного электродвигателя звездой он в 1,73 раза меньше, чем при соединении треугольником. На эту же величину уменьшается и мощность.
Окончательно убедиться в работоспособности созданного привода вы сможете только на практике. Но если вы будете следовать изложенным выше рекомендациям, то вероятность того, что все будет работать как надо без дополнительных переделок, значительно повысится.
Источник: