










Как подключить шаговый двигатель без контроллера
Содержание
- Схема шагового двигателя
- Сморите видео
- Как запустить шаговый двигатель без электроники
- Схема шагового двигателя
- Сморите видео
- Подключение шагового двигателя к Ардуино
- Принцип работы шагового двигателя
- Драйвер шагового двигателя Ардуино
- Как подключить шаговый двигатель к Ардуино
- Управление шаговым двигателем на Ардуино
- УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
- Типы шаговых двигателей
- Униполярные и биполярные шаговые двигатели
- Подключение шаговых двигателей
- Способы управления шаговыми двигателями
- Схема подключения шаговых двигателей
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
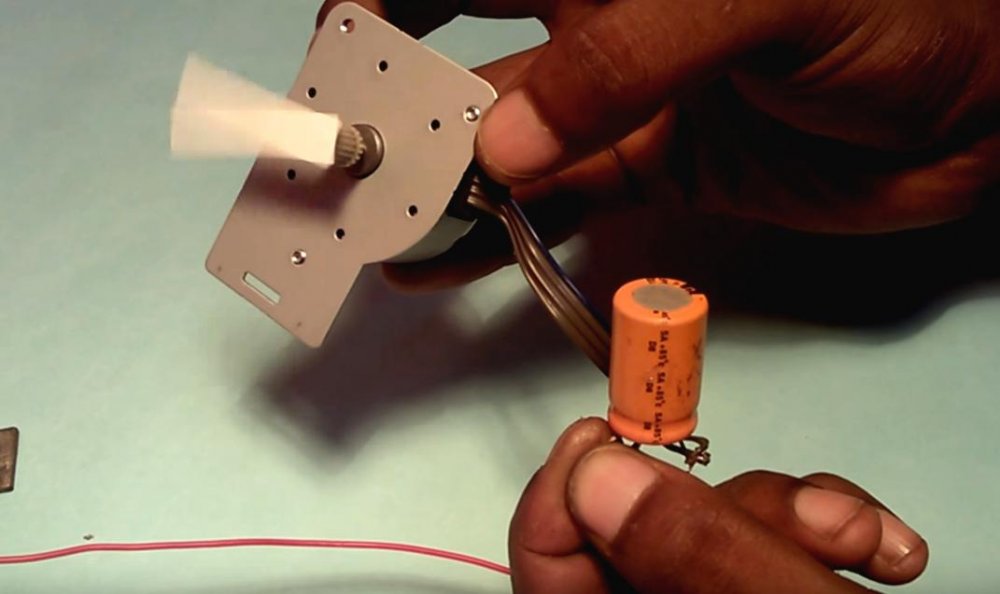
Для эксперимента использовался вот такой шаговый двигатель:
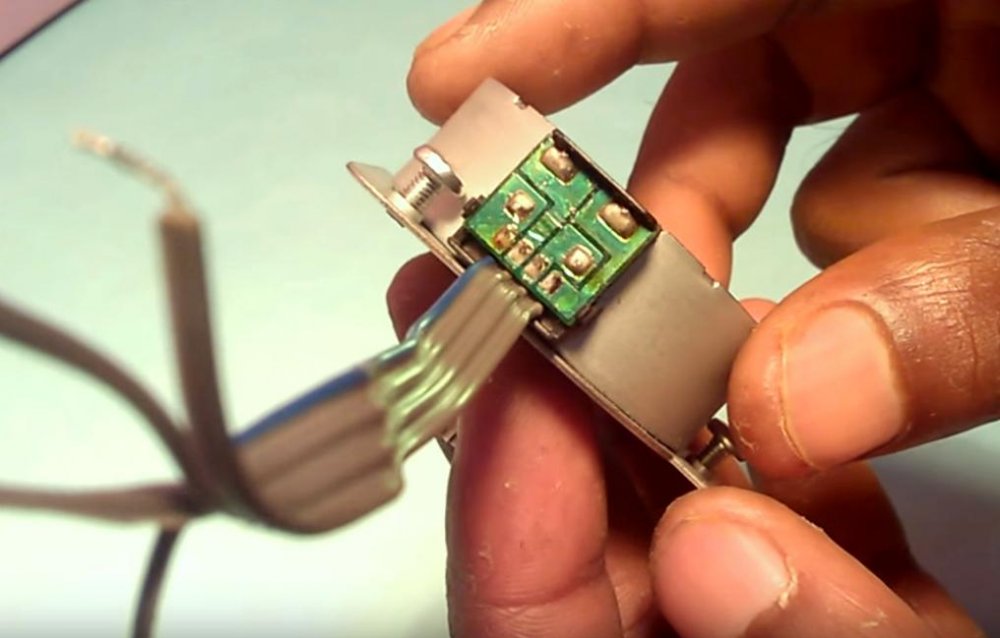
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
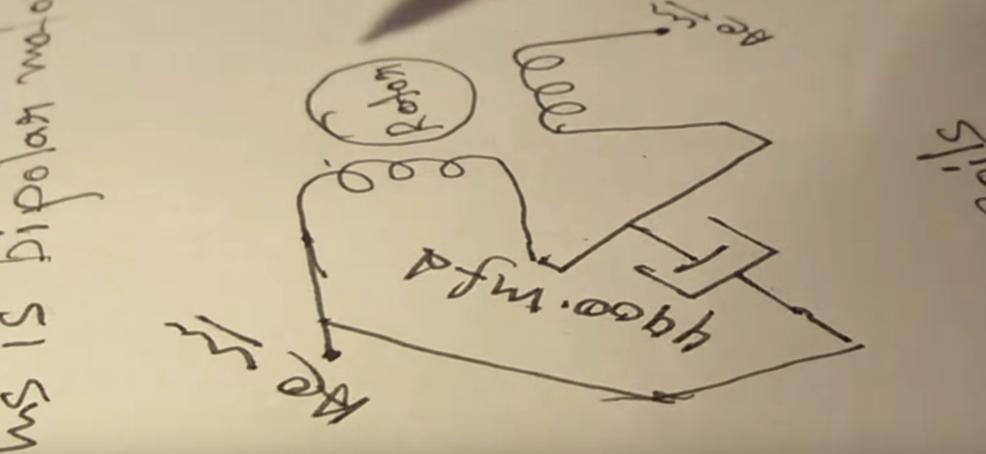
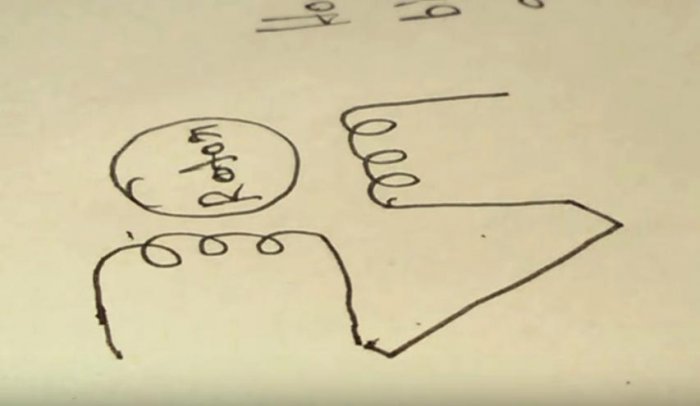
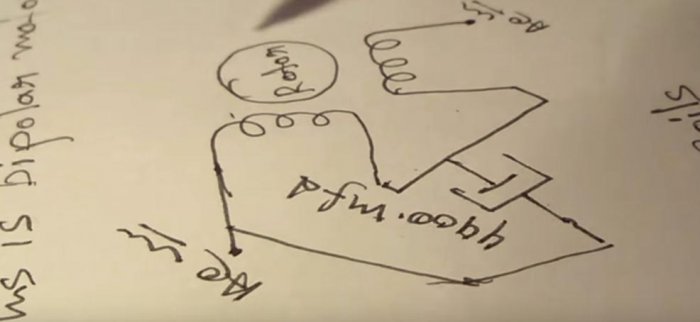
Схема шагового двигателя
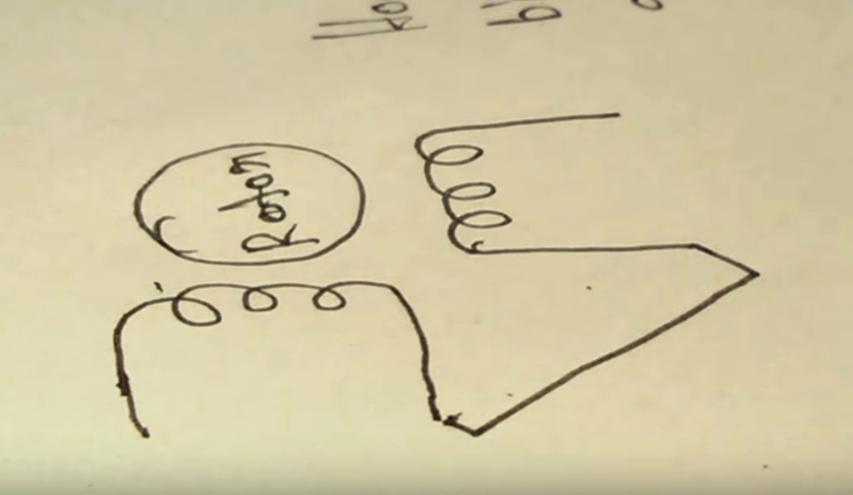
Схема обмоток данного двигателя выглядит вот так:
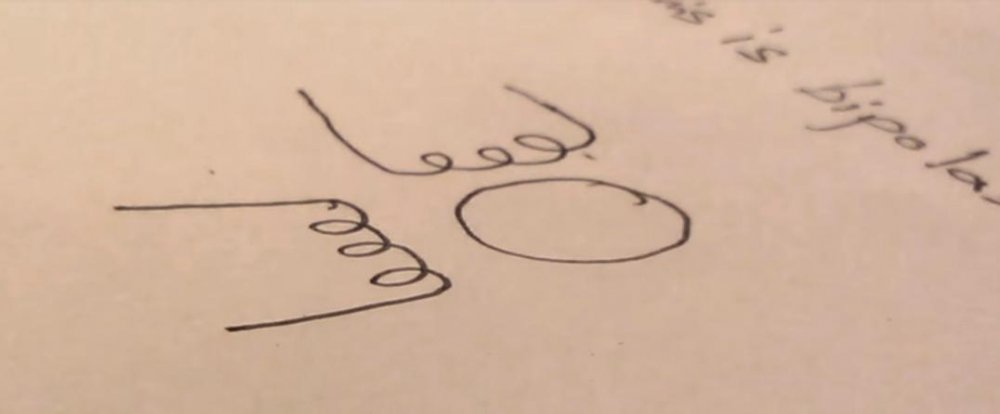
Она очень похожа на схему обычного асинхронного двигателя.
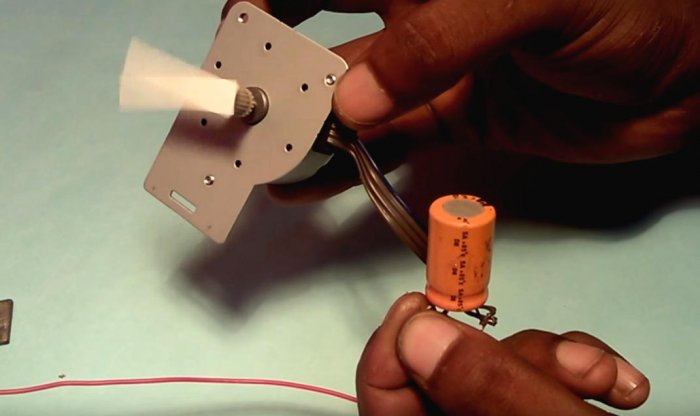
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
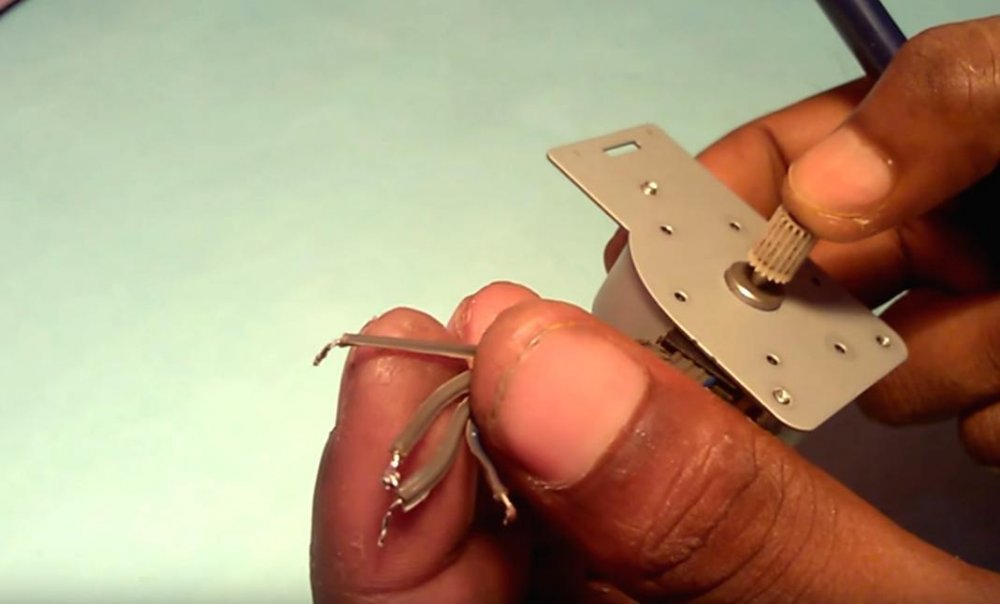
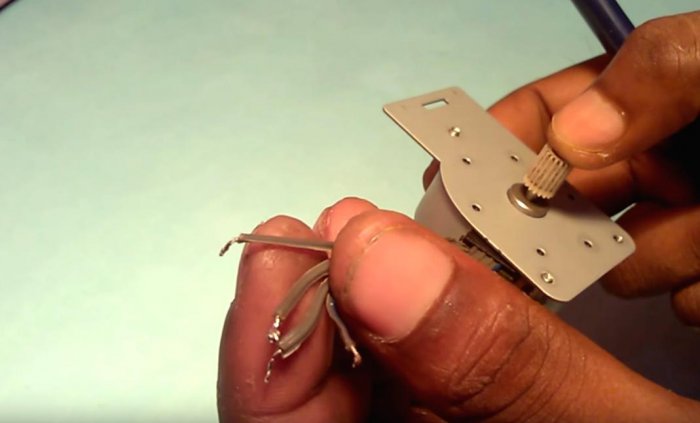
Замыкаем обмотки последовательно, как на схеме ниже.
Середину проводов нужно скрутить и спаять.
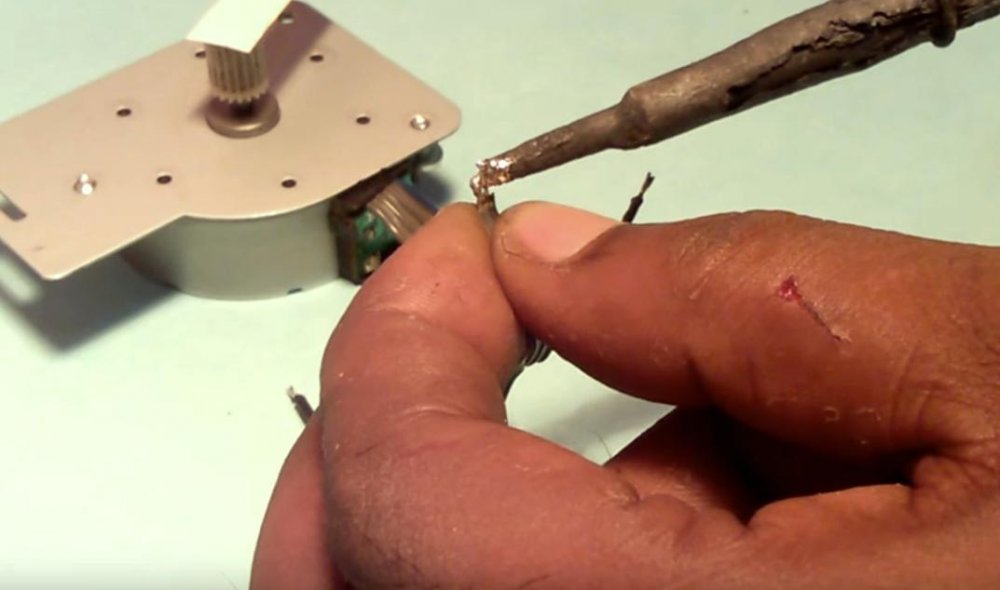
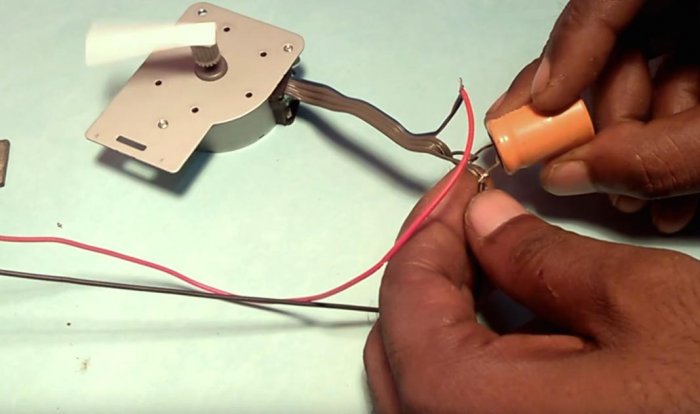
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
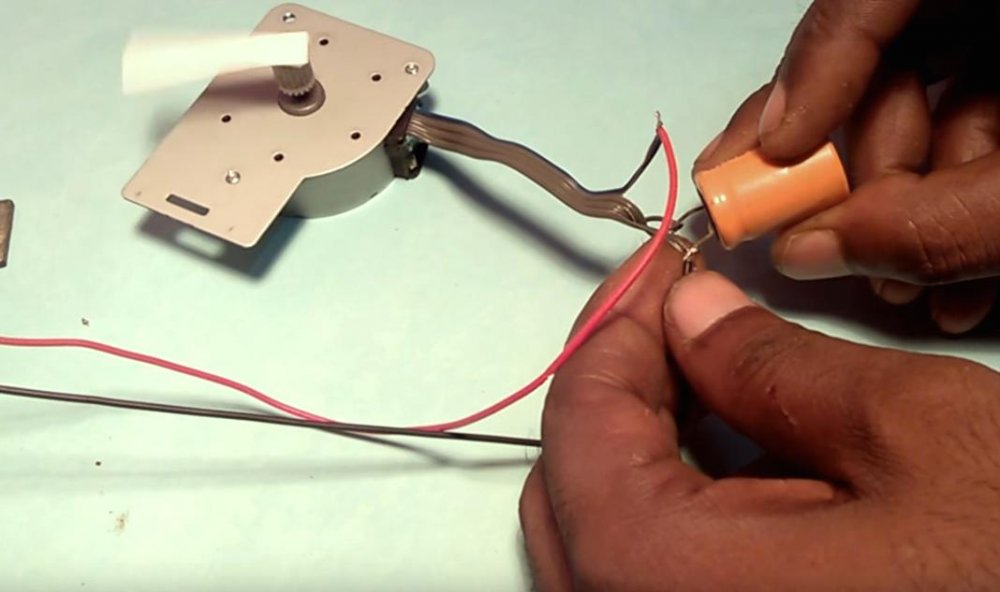
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Как запустить шаговый двигатель без электроники
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.
К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось – я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
Я взял вот такой двигатель.

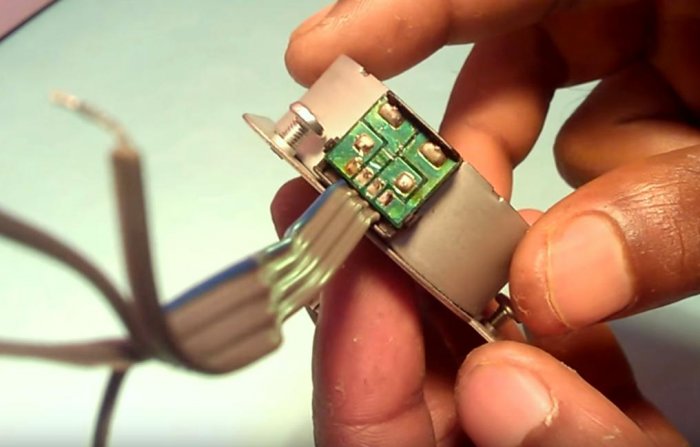
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
Очень похоже на схему обычного асинхронного двигателя.
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Подключение шагового двигателя к Ардуино
Шаговый двигатель Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим устройство и схему подключения шагового двигателя.
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для занятия нам понадобятся следующие детали:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».
Схема подключения шагового двигателя к Arduino UNO
Управление шаговым двигателем через Ардуино производится путем подачи импульсов на обмотки мотора в определенной последовательности. Для облегчения управления шаговым мотором созданы специальные библиотеки stepper.h и accelstepper.h, но можно вращать вал мотора без стандартных библиотек. Подключите шаговый мотор к микроконтроллеру, как на схеме выше и загрузите следующий скетч.
Скетч для управления шаговым двигателем
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- время задержки в миллисекундах int dl = 5; можно изменять, чем меньше задержка в программе, тем быстрее будет вращаться вал мотора;
- алгоритм работы программы, представлен на следующей картинке.
Последовательность включения обмоток шагового мотора
Управление шаговым двигателем на Ардуино
Рассмотрим управление шаговым мотором при помощи стандартной библиотеки stepper.h и с помощью более удобной и популярной библиотеки accelstepper.h, где реализовано намного больше дополнительных команд и функций. Схема подключения мотора при этом остается неизменной. Чуть дальше мы перечислили возможные команды, которые можно использовать в программе с этими библиотеками.
Скетч для шагового двигателя на Ардуино (Stepper.h)
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- библиотека Stepper.h имеет маленький функционал, поэтому подходит только для тестирования шагового двигателя и проверки подключения драйвера.
Скетч для шагового мотора с библиотекой AccelStepper.h
Пояснения к коду:
- библиотеку AccelStepper.h можно использовать при подключении шагового двигателя к Motor Shield L293D совместно с библиотекой AFMotor.h;
- в программе можно задавать не только максимальную скорость, но и ускорение и замедление вала шагового двигателя.
Описание команд библиотеки AccelStepper.h
AccelStepper mystepper(DRIVER, step, direction); // Шаговый двигатель, управляемый платой
AccelStepper mystepper(FULL2WIRE, pinA, pinB); // Шаговый двигатель, управляемый Н-мостом
AccelStepper mystepper(FULL4WIRE, pinA1, pinA2, pinB1, pinB2); // Униполярный двигатель
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.

Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
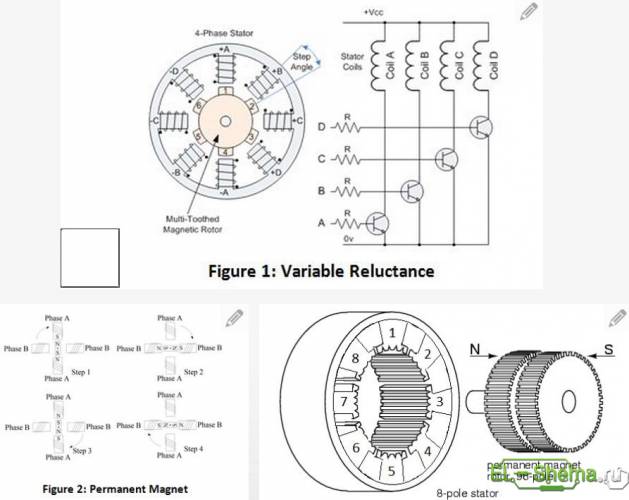
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
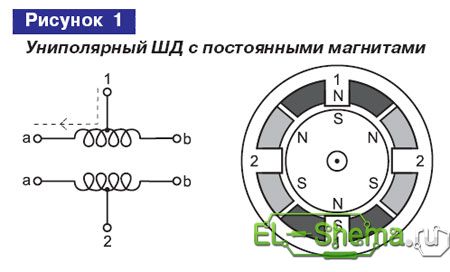
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
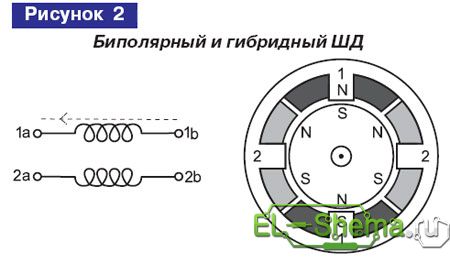
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
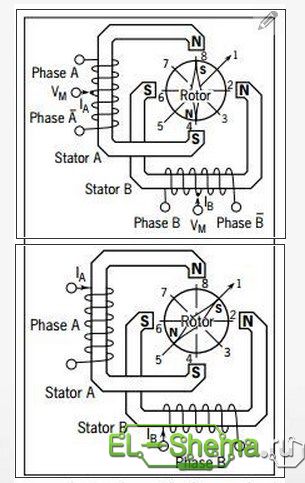
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
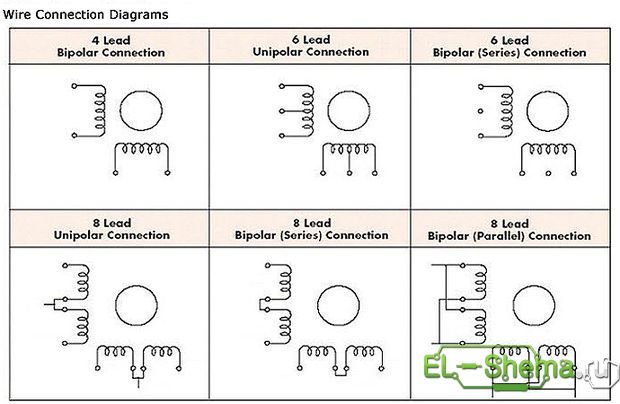
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
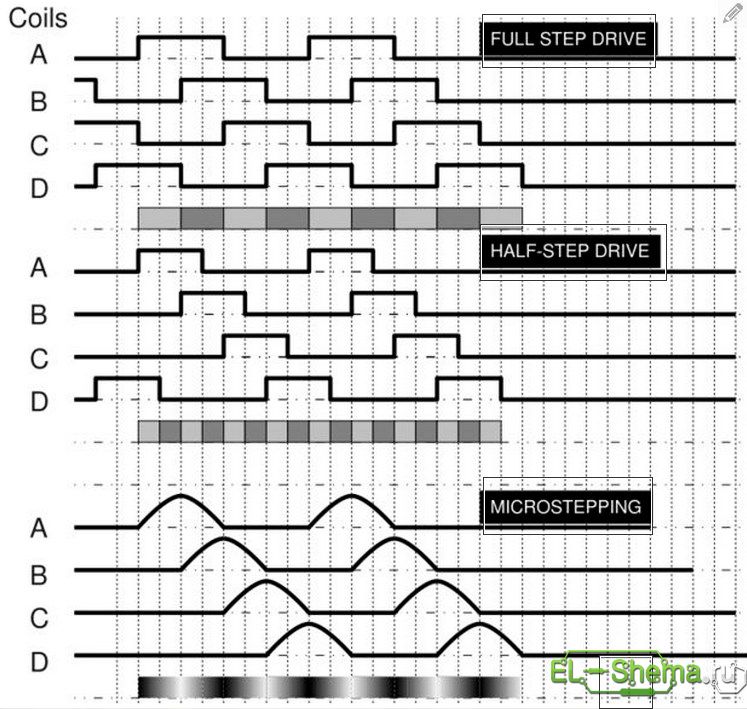
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
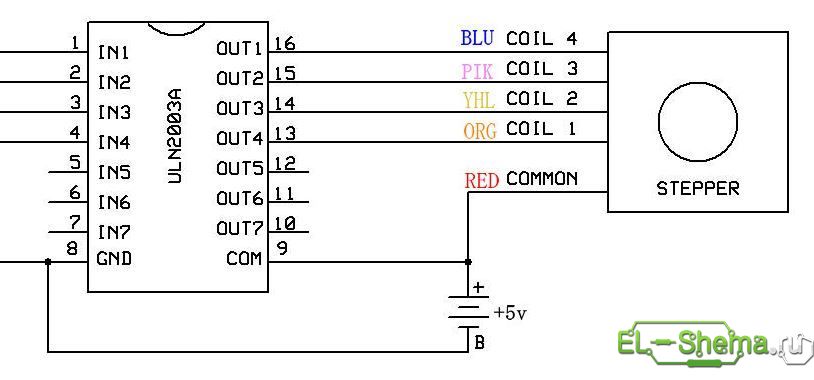
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Источник: