










Прерывания и многозадачность в Arduino
Отсутствие на Arduino операционной системы совершенно не означает, что невозможно решить проблему многозадачности для этого контроллера. Для этого просто нужна своеобразная методика, частью которой является использование прерываний.
Это могут быть прерывания по таймеру или внешние прерывания, уведомляющие о событиях, воздействующих на систему извне.
Прерывания и их источники
В процессе работы управляющий процессор выполняет определенные операции, а прерывание вызывает их остановку и в соответствие с кодом заставляет выполнить операции с более высоким приоритетом.
Проще говоря, прерывания это набор приоритетов для тех или иных процессов, исполняемых контроллером.
Этот процесс имеет название обработчик прерываний и дает возможность присоединить к себе определенную функцию. Она будет вызываться при поступлении сигнала прерывания. Процессор, вернувшись из обработчика, приступит к выполнению тех операций, в процессе исполнения которых поступил сигнал прерывания.
Источником сигнала прерывания может стать таймер Arduino или процесс изменения состояния одного из контактов (пинов). Еще одним источником может стать какой-либо вход внешних прерываний: нужный сигнал появится при изменении его состояния.
Прерывание можно заставить работать с помощью кода, который поможет отвечать на прерывание. При этом нет необходимости писать код в loop (), который используют для систематической проверки приоритета прерывания.
В момент получения сигнала процессор автоматически остановится, вызвав обработчик. При этом нет нужды беспокоиться о времени отклика на нажатие кнопки или продолжительной реакции на выполняемую программу.
Особенности прерывания по таймеру
Как же управлять временем и запускать процессы в нужном вам порядке? При работе с микросхемой Arduino для этого можно использовать millis(), ее эффективность зависит от постоянного обращения к ней. Тогда, в случае вызова этой функции, можно будет понять – наступило время определенной операции или нет.
Добиться эффективности можно при вызове millis() несколько раз в миллисекунду, но это довольно расточительно. Для вызова функции раз в миллисекунду (что является оптимальным вариантом) необходимо использовать таймер. Его можно установить на интервал в миллисекунду и добиться желаемого результата.
Микроконтроллер Arduino Uno укомплектован тремя таймерами: из них timer0 предназначен для генерации прерываний с интервалом в одну миллисекунду. При этом будет постоянно обновляться счетчик, передающий информацию функции millis(). Вести точный подсчет таймеру позволяет определенная частота, получаемая из 16 МГц процессора.
Arduino, при необходимости, позволяет произвести конфигурацию делителя частоты с подбором оптимального режима счета.

Функция timer0 оперирует тактовым делителем на 64 и изменять это значение не стоит. Оно позволяет получить частоту прерывания, близкую к 1 кГц, оптимальную для целей большинства схемотехников. Если попытаться изменить данный параметр, то можно нарушить работу функции millis().
Регистры сравнения и их роль в генерации прерывания
Регистры сравнения выполняют функцию анализа хранимых данных с текущим состоянием счетчика прерывания. Например, регистр сравнения (OCR0A) эффективно применяется для прерывания в середине счета.
Программный код, пример которого приведен ниже, позволит генерировать функцию TIMER0_COMPA при прохождении счетчика 0xAF:
Для оптимизации работы кода и микроконтроллера следует полностью отказаться от loop(). Для этого необходимо определение по вектору обработчика прерывания с помощью функции TIMER0_COMPA_vect. Благодаря ей обработчик и будет выполнять все те операции, что раньше делались в loop().
Данный код позволит вернуться к использованию функции delay(), благодаря чему все классические мерцающие светодиоды или работающие сервоприводы будут функционировать без проблем, но при этом мы получим удобный и практичный таймер.
Какие внешние воздействия вызывают прерывание
Вызвать внешние прерывания могут определенные действия из внешней среды. Это может быть простым нажатием на кнопку или срабатыванием используемого датчика. При этом нет необходимости вести постоянный опрос вывода GPIO о происходящих изменениях.
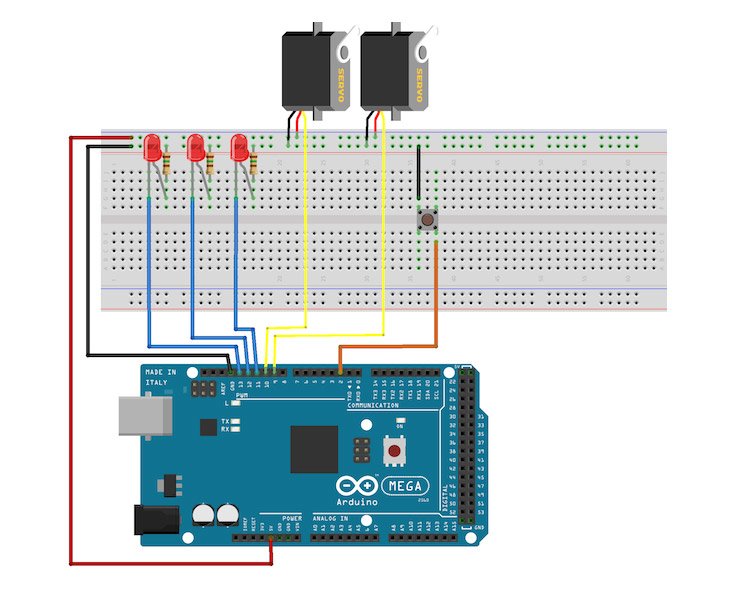
Микроконтроллер Arduino может иметь несколько пинов, способных обрабатывать внешние прерывания. Так, на плате Arduino Uno их два, а на Arduino Mega 2560 – 6. Продемонстрировать их функционал можно с помощью кнопки сброса сервопривода. Для этого при написании кода в класс Sweeper необходимо добавит функцию reset(). Она способна установить нулевое положение и перетаскивать в нее сервопривод.
Соединить обработчик с внешним прерыванием поможет другая функция attachInterrupt(). На приведенных в качестве примеров микроконтроллерах Interrupt0 реализована на втором контакте. Она сообщает микроконтроллеру о том, что на данном входе ожидается спад сигнала.
Достаточно нажать кнопку и сигнал действительно падает до минимального уровня, вызывая обработчик Reset.
В результате, при нажатии кнопки сервоприводы сбрасываются, возвращаясь в нулевое положение. Схема внешних прерываний простая, и с помощью приведенных в примере скетчей, можно будет получить довольно легко желаемый результат.
Полный код программы с таймерами и внешними прерываниями:
Библиотеки прерываний
У схемотехников, благодаря Всемирной паутине есть доступ к широкому кругу библиотек, которые существенно облегчат работу с таймерами. Большинство из них предназначены для тех, кто применяет функцию millis(), но есть и такие, которые позволяют произвести желаемую настройку таймеров и сгенерировать прерывания. Оптимальным вариантом для этого являются библиотеки TimerThree и TimerOne, разработанные Paul Stoffregan.
Благодаря им, схемотехники получают широкий выбор возможностей, с помощью которых можно сконфигурировать прерывания с помощью таймера. Первая из этих библиотек не работает с Adruino Uno, но прекрасно зарекомендовала себя с платами Teensy, микроконтроллерами Adruino Mega2560 и Adruino Leonardo.
Недостатком Adruino Uno является наличие всего двух ходов, предназначенных для работы с внешними прерываниями. Если требуется большее количество подобных пинов, то отчаиваться не стоит, ведь этот микроконтроллер поддерживает pin-change – прерывания по изменению входа и работает это на всех восьми входах.
Их отличие от простых внешних прерываний в сложности обработки, так как схемотехнику требуется отслеживать последнее из известных состояний пинов. Только в этом случае можно будет понять, какой из них вызвал прерывание.
Наиболее информативное и практичной библиотекой для прерываний по изменению входа является PinChangeInt.
Прерывания: основные правила работы
В ходе реализации проекта может потребоваться несколько прерываний, но если каждое из них будет иметь максимальный приоритет, то фактически его не будет ни у одной из функций. По этой же причине не рекомендуется использовать более десятка прерываний.
Обработчики должны применяться только к тем процессам, которые имеют максимальную чувствительность ко временным интервалам. Не стоит забывать, что пока программа находится в обработчике прерывания – все другие прерывания отключены. Большое количество прерываний ведет к ухудшению их ответа.
В момент, когда действует одно прерывание, а остальные отключаются, возникает два важных нюанса, которые должен учитывать схемотехник. Во-первых, время прерывание должно быть максимально коротким.
Это позволит не пропустить все остальные запланированные прерывания. Во-вторых, при обработке прерывания программный код не должен требовать активности от других прерываний. Если этого не предотвратить, то программа просто зависнет.
Не стоит использовать длительную обработку в loop(), лучше разработать код для обработчика прерывания с установкой переменной volatile. Она подскажет программе, что дальнейшая обработка не нужна.
Если вызов функции Update() все же необходим, то предварительно необходимо будет проверить переменную состояния. Это позволит выяснить, необходима ли последующая обработка.
Перед тем, как заняться конфигурацией таймера, следует произвести проверку кода. Таймеры Anduino стоит отнести к ограниченным ресурсам, ведь их всего три, а применяются они для выполнения самых разных функций. Если запутаться с использованием таймеров, то ряд операций может просто перестать работать.
Какими функциями оперирует тот или иной таймер?
Для микроконтроллера Arduino Uno у каждого из трех таймеров свои операции.
Так Timer0 отвечает за ШИМ на пятом и шестом пине, функции millis(), micros(), delay().
Другой таймер Timer1, используется с ШИМ на девятом и десятом пине, с библиотеками WaveHC и Servo.
Timer2 работает с ШИМ на 11 и 13 пинах, а также с Tone.
Схемотехник должен позаботиться о безопасном использовании обрабатываемых совместно данных. Ведь прерывание останавливает на миллисекунду все операции процессора, а обмен данных между loop() и обработчиками прерываний должен быть постоянным. Может возникнуть ситуация, когда компилятор ради достижения своей максимальной производительности начнет оптимизацию кода.
Результатом этого процесса будет сохранение в регистре копии основных переменных кода, что позволит обеспечить максимальную скорость доступа к ним.
Недостатком этого процесса может стать подмена реальных значений сохраненными копиями, что может привести к потере функциональности.
Чтобы этого не произошло нужно использовать переменную voltatile, которая поможет предотвратить ненужные оптимизации. При использовании больших массивов, которым требуются циклы для обновлений, нужно отключить прерывания на момент этих обновлений.
Источник: